优傲UR机器人UR3/5/10维保步骤
一、先进行初步清洁:控制器以及机械臂上的灰尘、污垢、机油
二、进行控制器校验:功能(néng)校验,之后清洁更换过滤器
三、进行机械臂校验:功能(néng)校验、目视校验
四、进行零件的维修和更换:处理(lǐ)勿受静電(diàn)损坏的零件
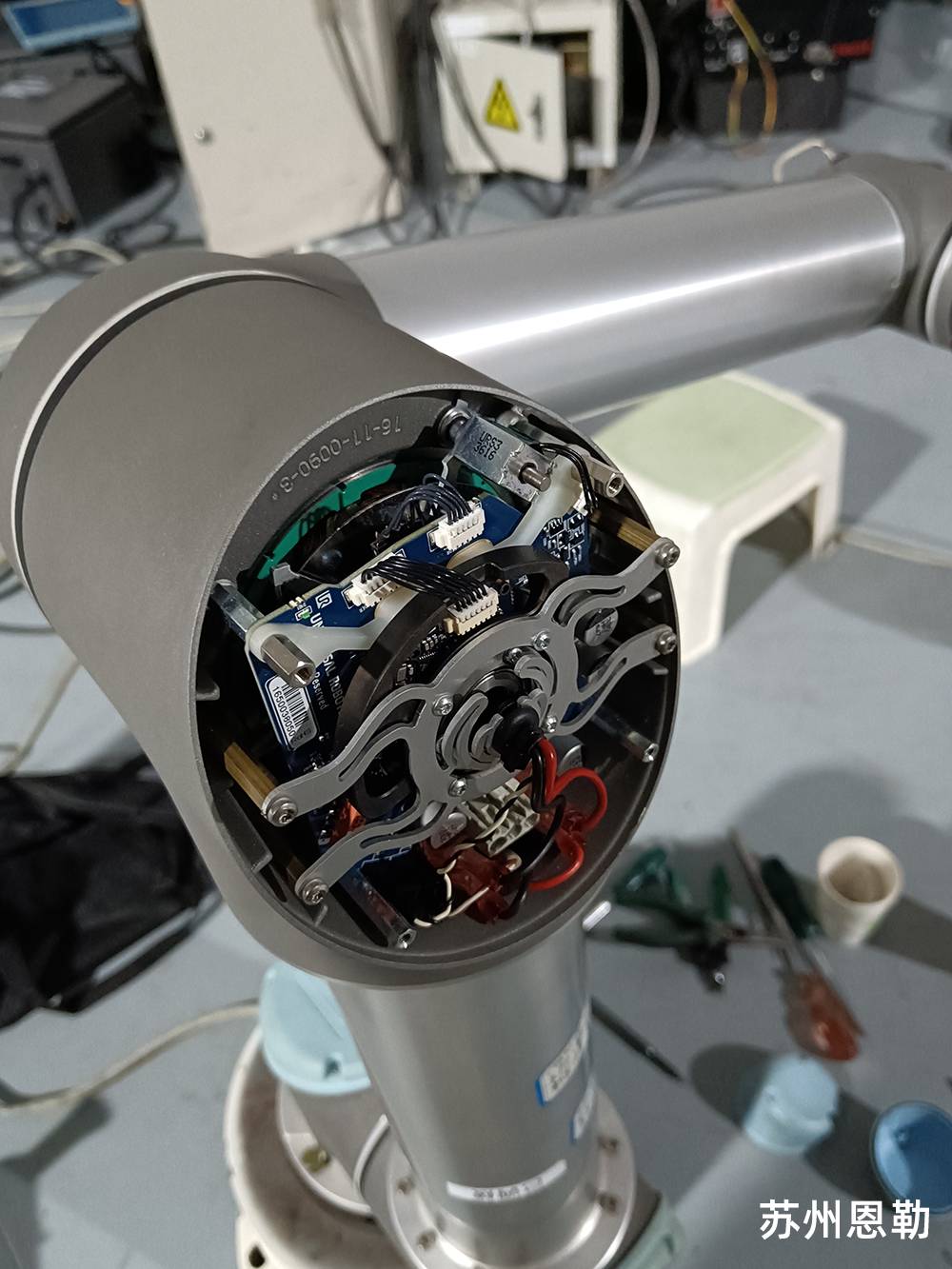
1.机械警配置;
2.制动器释放;
3.将关节与配对关节分(fēn)离的一般指引;
4.扭矩值检查;
5.底座关节一底座安(ān)装(zhuāng)支架、肩部关节一底座关节、上臂一肩部关节、时部关节一上臂、肘部配对的关节一肘部关节:装(zhuāng)配、手腕1关节-下臂、 手腕2关节-手腕1关节、手腕3关节-手腕2关节、工(gōng)具(jù)法兰-手腕3关节,校准关节;
6.双机械臂校准;
7.重改关节标识;
8.关节备件调整;
9.線(xiàn)束安(ān)装(zhuāng)
六、控制器检修保养
1.更换主机板;
2.主机板升级;
3.更换安(ān)全控制板;
4.更换示教器;
5.更换 48V 電(diàn)源;
6.更换12V 電(diàn)源;
7.更换12V 電(diàn)源
七、软件
1.更新(xīn)软件;
2.更新(xīn)关节固件;
3.使用(yòng)魔法(Magic)文(wén)件;
4.数据备份;
八、故障排除
1.检查错误代码;
2.检查安(ān)全控制板上的 LED 指示灯和保险丝;
3.错误现象:控制箱初始化时没有(yǒu)显示控制器、 通電(diàn)期间没有(yǒu)显示電(diàn)缆、保护性停止、初始化时迪電(diàn)失败、碰撞后的检查表、与关节和工(gōng)具(jù)的通信、完整的重启操作(zuò)。