如何解决库卡机器人碰撞报警无法移动的情况呢(ne)?
1、碰撞检测设置
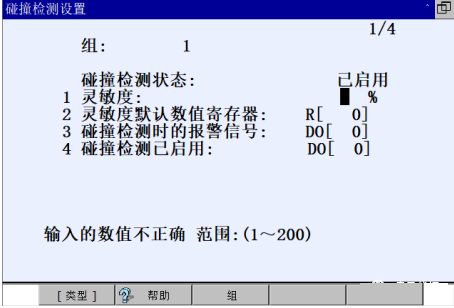
在菜单里我们可(kě)以找到碰撞检测的设置画面,正常情况下,其设置如下:

从上图我们可(kě)以看到碰撞检测状态為(wèi)“已启用(yòng)”,灵敏度為(wèi)100%。
2、执行方法
為(wèi)了能(néng)够消除碰撞报警,进而移动机器人,我们可(kě)以采取以下两种方法:
(1)降低碰撞灵敏度:将光标移至碰撞灵敏度选项,将数值调到***低,但***低数值不能(néng)為(wèi)0,如下图:
在碰撞程度较為(wèi)严重时,此种方法不一定起到作(zuò)用(yòng),那就要用(yòng)到第二种方法。
(2)禁用(yòng)“碰撞检测状态”
此种方法需要用(yòng)到指令操作(zuò),因為(wèi)光标准是移动不到“碰撞检测状态”选项的,需要执行以下指令:
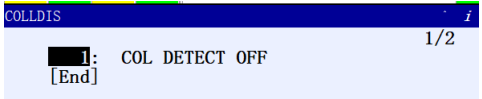
执行后“碰撞检测状态”被禁用(yòng):
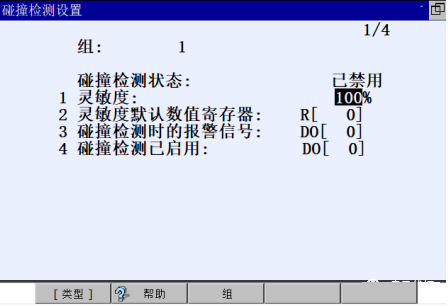
此时,便可(kě)解除碰撞报警,移动机器人。
苏州恩勒——专业工(gōng)控维修——不限品牌型号
苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。






