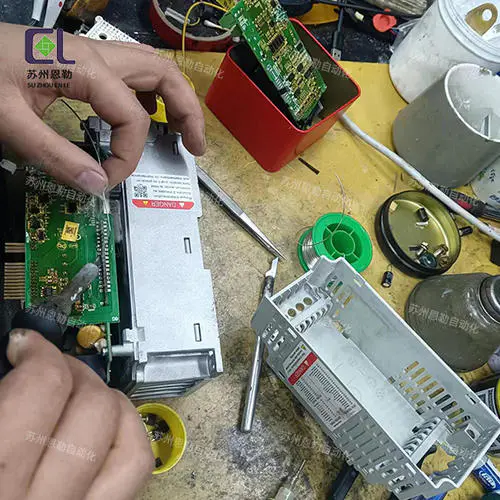
UR3机器人关节编码器维修测试—昆山(shān)机械公(gōng)司—苏州恩勒专业UR3/5/10优傲机器人维护改造UR3机器人关节编码器维修测试—昆山(shān)机械公(gōng)司—苏州恩勒专业UR3 UR5 UR10优傲机器人维护改造—苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司ur机器人关节编码器错误的原因是编码器损坏。ur机器人关节编码器本身元器件出现故障,导致其不能(néng)产(chǎn)生和输出正确的波形,这种情况下需更换编码器或维修其内部器件。UR3机器人关节编码器维修测试—昆山(shān)机械公(gōng)司—苏州恩勒专业UR3 UR5 UR10优傲机器人维护改造—苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司维修各系列UR机器人:UR3系列维修 UR5系列维修 UR10系列维修 UR16系列维修 UR3E系列维修 UR5E系列维修 UR10E系列维修 UR16E系列维修 维修UR故障:示教器无显示、编码器报警、过流、过压、过热、过载、接地、参数错误、有(yǒu)显示无输出、模块损坏、报错等UR3机器人关节编码器维修测试—昆山(shān)机械公(gōng)司—苏州恩勒专业UR3 UR5 UR10优傲机器人维护改造—苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司UR5e是一种轻量型且适应性强的协作(zuò)工(gōng)业机器人,可(kě)凭借其高度的灵活性来应对中(zhōng)型应用(yòng),它能(néng)够无缝集成到各种应用(yòng)之中(zhōng)。UR5e也提供OEM机器人系统版本,且带有(yǒu)3挡位示教器。UR5e灵活机器人非常适合优化轻量协作(zuò)式流程,如拾取、放置和测试。UR5e协作(zuò)机器人的工(gōng)作(zuò)半径达33.5英寸(850毫米)UR协作(zuò)机器人本體(tǐ)是相对轻便简单的工(gōng)业机器人,本體(tǐ)包含各轴关节、電(diàn)机、刹車(chē)、控制電(diàn)路。控制部分(fēn)包含主板、安(ān)全控制板、示教器、48V電(diàn)源、12V電(diàn)源、電(diàn)流分(fēn)配器。控制柜小(xiǎo)巧精(jīng)致,故障检测与拆装(zhuāng)要求就高了些。在我公(gōng)司UR机器人备件充足,工(gōng)程师维修经验丰富,可(kě)以随时快速解决UR机器人各种故障。UR3机器人关节编码器维修测试—昆山(shān)机械公(gōng)司—苏州恩勒专业UR3 UR5 UR10优傲机器人维护改造—苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 苏州恩勒——机器人维修平台承接全國(guó)机器人维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁关于我们苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013509455扫码添加我们 了解更多(duō)内容

kuka库卡KR50 R2500/SEL手腕减速机故障维修—浙江汽車(chē)底盘公(gōng)司—苏州恩勒专业库卡机器人维护改造kuka库卡KR50 R2500/SEL手腕减速机故障维修—浙江汽車(chē)底盘公(gōng)司——苏州恩勒专业库卡机器人维护改造KUKA|库卡机器人——工(gōng)业机器人减速机常见问题以及原因一、工(gōng)业机器人减速机 机器人减速器一般用(yòng)谐波减速器 与RV减速器(即摆線(xiàn)针轮减速器),目前*好的还是径差子减速器(它是汽車(chē)差速器演变而来的)。谐波减速器工(gōng)艺性差,包括日本在内改良还不断; RV减速器工(gōng)艺成熟,眵曲轴等I艺难度大,径差子减速器也是RV减速器之改良型即取消曲轴,艺优良且更成熟与优越,径差子减速器传动比可(kě)达无穷大(实用(yòng)型為(wèi)单齿差), 體(tǐ)积比是谐波减速器之二分(fēn)一(即等體(tǐ)积模数是谐波减速器二_倍) ,谐波减速器柔性传动,径差子减速器刚性传动,机器人刚性传动运动到位缓冲行程更短且小(xiǎo)RV减速器,径差子减速器适用(yòng)于机器人各个关节,谐波减速器柔性传动(柔杯与交差滚子轴承极易产(chǎn)生共振,当然也有(yǒu)人说晃动即高频振动加控制制动所产(chǎn)生较大幅度之振动)。径差子减速器传动效率与行星减速器相当小(xiǎo)于谐波减速器与RV减速器,然不少谐波减速器传动效率低于0.6,径差子减速器啮合齿数是行星减速器五倍以上却小(xiǎo)于谐波减速器与RV减速器,而径差子减速器理(lǐ)论精(jīng)度只能(néng)高于谐波减速器难以超越RV减速器( I艺上就能(néng)完全超越)。径差子减速器其传输功率大得惊人(谐波减速器I业机器人负荷10Kg,径差子减速器I业机器人就可(kě)负荷2000Kg)。现中(zhōng)海油采用(yòng)國(guó)外行星减速器潜油泵只能(néng)用(yòng)9”(228.6mm) 扣,辽河油田与沈阳大學(xué)现王子贵博士采用(yòng)差子减速器潜油泵可(kě)突破5”(127mm) 小(xiǎo)井口(即外径小(xiǎo)于105mm差子减速器载荷可(kě)达35KW功率)。kuka库卡KR50 R2500/SEL手腕减速机故障维修——苏州恩勒专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司二、减速机常见问题及其原因1.工(gōng)业机器人减速机发热和漏油。為(wèi)了提高效率,工(gōng)业机器人减速机一般均采用(yòng)有(yǒu)色金属做蜗轮,蜗杆则采用(yòng)较硬的钢材。由于是滑动摩擦传动,运行中(zhōng)产(chǎn)生较多(duō)的热量,使I业机器人减速机各零件和密封之间热膨胀产(chǎn)生差异,从而在各配合面形成间隙,润滑油液由于温度的升高变稀,易造成泄漏。造成这种情况的原因主要有(yǒu)四点,-是材质(zhì)的搭配不合理(lǐ); - 二是啮合摩擦面表面的质(zhì)量差;三是润滑油添加量的选择不正确;四是装(zhuāng)配质(zhì)量和使用(yòng)环境差。2.传动小(xiǎo)斜齿轮磨损。-般发生在立式安(ān)装(zhuāng)的工(gōng)业机器人减速机上,要与润滑油的添加量和油品种有(yǒu)关。立式安(ān)装(zhuāng)时,很(hěn)容易造成润滑油量不足,I业机器人减速机停止运转时,電(diàn)机和工(gōng)I业机器人减速机间传动齿轮油流失,齿轮得不到应有(yǒu)的润滑保护。工(gōng)业机器人减速机启动时,齿轮由于得不到有(yǒu)效润滑导致机械磨损甚至损坏。kuka库卡KR50 R2500/SEL手腕减速机故障维修——苏州恩勒专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司3.蜗杆轴承损坏。发生故障时,即使减速箱密封良好,还是经常发现工(gōng)业机器人减速机内的齿轮油被乳化,轴承生锈、腐蚀、损坏。这是因為(wèi)工(gōng)业机器人减速机在运行一段时间后, 齿轮油温度升高又(yòu)冷却后产(chǎn)性的凝结水与水混合。当然,与轴承质(zhì)量及装(zhuāng)配工(gōng)艺密切相关。4.蜗轮磨损。蜗轮-般采用(yòng)锡青铜, 配对的蜗杆材料用(yòng)45钢淬硬至hrc4555, 或40cr淬硬hrc5055后经蜗杆磨床磨削至粗糙度ra0.8μm。I业机器人减速机正常运行时磨损很(hěn)慢,某些工(gōng)业机器人减速机可(kě)以使佣10年以上。如果磨损速度较快,就要考虑选型是否正确,否超负荷运行,以吸的材质(zhì)、装(zhuāng)配质(zhì)量或使用(yòng)环境等原因。kuka库卡KR50 R2500/SEL手腕减速机故障维修——苏州恩勒专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 苏州恩勒自动化苏州恩勒自动化--机器人维修平台承接全國(guó)机器人维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒自动化——深耕维修十年关于我们苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013509455扫码添加我们 了解更多(duō)内容
22F-D4P2N103罗克韦尔AB变频器维修检测——专业AB伺服驱动器变频器维修苏州恩勒专业AB伺服驱动器维修出售22F-D4P2N103罗克韦尔AB变频器维修检测——专业AB伺服驱动器变频器维修——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司AB变频器常见故障一、電(diàn)动机不能(néng)启动原因:没有(yǒu)输出電(diàn)压送给電(diàn)动机补救措施:检查電(diàn)源電(diàn)路,如電(diàn)源電(diàn)压、所有(yǒu)焰断器以及断路装(zhuāng)置,检查電(diàn)动机票,核查電(diàn)动机连接是否正确,控制输入信号,起动信号是否存在。VO端子01是否激活,核查P036与组态是否匹配。核查A095是否没有(yǒu)禁止转动。22F-D4P2N103罗克韦尔AB变频器维修检测——专业AB伺服驱动器变频器维修——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司AB变频器常见故障二、 变频器不能(néng)从端子排连接線(xiàn)所送入的启动或运行输入启动原因:变频器存在故障。这类原因补教措施主要是清除故障,按停止键,重新(xīn)上点,将A100设置為(wèi)选项1“清除故障”.若A051-A052被设置為(wèi)选项7"清除故障”, 则重新(xīn)送入数字量输入信号.编程不正确。补教措施為(wèi)检查参数设置。变频器维修输入接線(xiàn)不正确。补救措施:正确接線(xiàn)并/或安(ān)装(zhuāng)跳線(xiàn)。22F-D4P2N103罗克韦尔AB变频器维修检测——专业AB伺服驱动器变频器维修——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司AB变频器常见故障三、变频器不能(néng)从集成式健盘启动原因:集成式键盘没被使能(néng)。将参数P036设置為(wèi)选项0,将参数A051- A052设置為(wèi)选项5,井激活输入。I/O端子01的“停止” 输入信号不存在。正确接線(xiàn)并/或安(ān)装(zhuāng)跳線(xiàn)。AB变频器常见故障四、变频器对速度命令不作(zuò)响应原因:速度命令源中(zhōng)没有(yǒu)给定速度。检查参数D012,看控制信号来源是否正确。如果是模拟量输入,则检查接線(xiàn)并用(yòng)表计检查信号是否存在。检查参数D002,核查命令是否正确。通过遠(yuǎn)程设备或数字量输入选择了不正确的基准信号源。检查参数D012,检查参数D014,看输入是否选择交流電(diàn)源。核查A051- A052的设置,检查P038中(zhōng)的速度基准来源。如果有(yǒu)必要就重新(xīn)编程。22F-D4P2N103罗克韦尔AB变频器维修检测——专业AB伺服驱动器变频器维修——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司AB变频器常见故障五、電(diàn)动机和或变频器不能(néng)加速到命令速度原因与措施:加速时间过長(cháng)。对参数P039或A067重新(xīn)编程。额外的负载或太短的加速时间促使变频器达到電(diàn)流极限,从而放慢或停止加速。比较D003和A089去掉额外负载或对参数P039或A067重新(xīn)编程。检查| A084的设置是否不恰当。速度命令源或数值不是预期值。核查D002、 D012的速度命令是否恰当。过编程阻止变频器的输出超过极限值。检查P035 ,确保速度不会受到编程的限制。22F-D4P2N103罗克韦尔AB变频器维修检测——专业AB伺服驱动器变频器维修——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司AB变频器常见故障六、電(diàn)动机运行不稳定原因与措施:電(diàn)动机输入数据不正确。将電(diàn)动机铭牌数据正确地输入到P031、P032和P033.使能(néng)A097 ,用(yòng)A084缩小(xiǎo)推进電(diàn)压。AB变频器常见故障七、变频器不能(néng)使電(diàn)动机反向运转反向控制没有(yǒu)选择数字量输入。检查数字量输入X选择為(wèi)反向运行模式选择正确的输入和程序。数字量输入接線(xiàn)不正确。检查输入接線(xiàn)。電(diàn)动机反转的布線(xiàn)定相不当。交换電(diàn)动机的两根导線(xiàn)。反向被禁止。检查A095。22F-D4P2N103罗克韦尔AB变频器维修检测——专业AB伺服驱动器变频器维修——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司承接全國(guó)工(gōng)业机器人、工(gōng)控自动化维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读staubli史陶比尔CS9控制器驱动层電(diàn)路板维修测试——专业史陶比尔机器人维护改造测试 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)倍福工(gōng)控机维修检测—苏州恩勒专业倍福驱动器模块工(gōng)控机触摸屏维修检测 - 人机界面维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)苏州恩勒专业机器人示教器手柄维修测试出售 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验
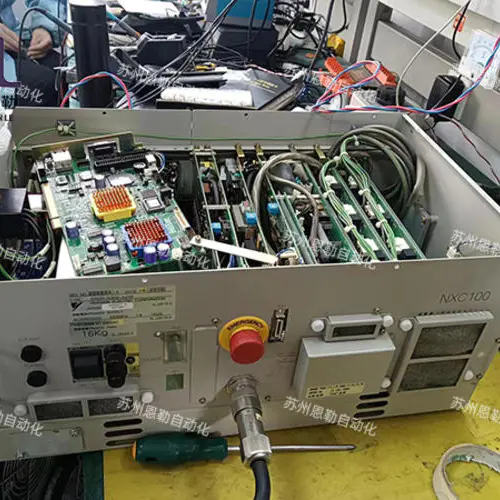
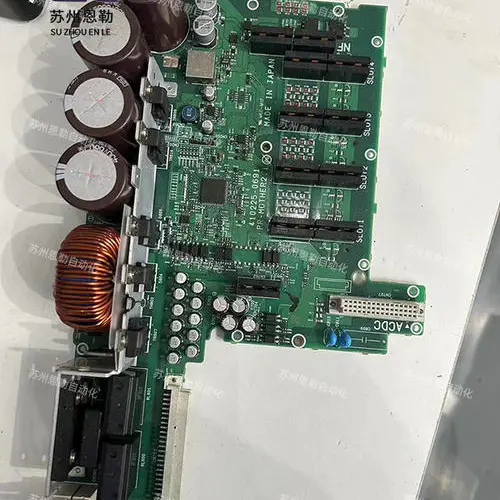
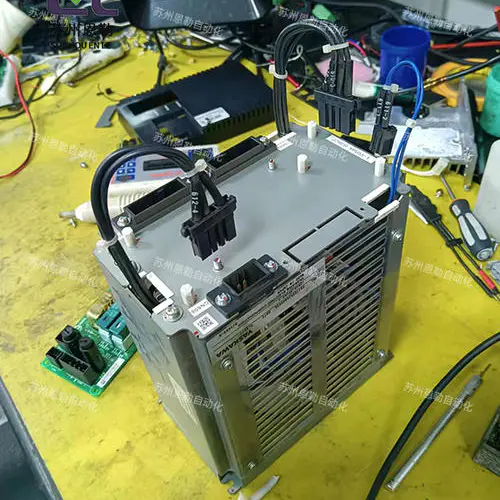
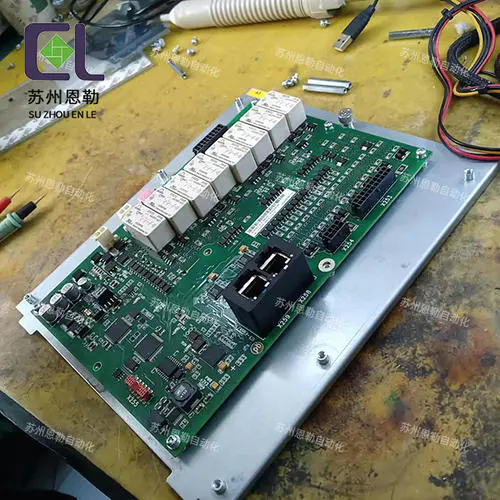
史陶比尔CS8C控制柜芯片级维修测试——专业史陶比尔维护改造苏州恩勒专业史陶比尔机器人维修出售史陶比尔CS8C控制柜芯片级维修测试——专业史陶比尔维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司史陶比尔CPT主机、RSI板卡、ARPS1/2/3電(diàn)源模块、主板通讯板、DSI板卡、DeviceNet板卡、BIO板卡I/O通讯模块EtherCAT板卡维修测试出售arps2/3 rsi dsi cpt starc sp1 sp2新(xīn)款机器人電(diàn)源层 逻辑层 驱动层 极速快修!史陶比尔全系列机器人快速抢修!承接全國(guó)工(gōng)业机器人、工(gōng)控自动化维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读ABB机器人IO板DSQC691 3HAC037084-001/0维修测试——专业ABB机器人维护改造 - 控制板卡维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)安(ān)川NCX100控制器ERCR-NS00-A200维修检测——专业安(ān)川机器人维护改造 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)MR-J2M-100U三菱伺服模块批量维修检测——专业三菱伺服器维修 - PLC相关维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

发那科(kē)R-2000iB机器人维修保养改造调试——专业发那科(kē)机器人维护配件出售苏州恩勒专业发那科(kē)机器人维修出售发那科(kē)R-2000iB机器人维修保养改造调试——专业发那科(kē)机器人维护配件出售——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司正常情况下,VRDY和PRDY信号应同时存在。405 位置控制系统错误,由于NC或伺服系统的问题使返回参考点的操 作(zuò)失败。重新(xīn)进行返回参考点的操作(zuò)。410 X轴停止时,位置误差出设定值。411 X轴运动时,位置误差出设定值。Fanuc发那科(kē)R-2000iB-210F维修 同时,在以上检测过程中(zhōng)发现伺服電(diàn)动机每次转动到某一固定的角度上时,均出现“突跳”现象,且在无“突跳”區(qū)域,运动距离与電(diàn)动机轴转过的角度基本相符(无法测量,依靠观察确定)。根据以上试验可(kě)以判定故障是由于X轴的位置检测系统不良引起的,考虑到“突跳”仅在某一固定的角度产(chǎn)生,且在无“突跳”區(qū)域,运动距离与電(diàn)动机轴转过的角度基本相符。436 Z轴编码器故障。437 Z轴電(diàn)机参数错误,检查8320、8322、8323、8324号参数。3. 程报警510 X轴正向软极限程。511 X轴负向软极限程。520 Y轴正向软极限程。521 Y轴负向软极限程。530 Z轴正向软极限程。531 Z轴负向软极限程。发那科(kē)R-2000iB机器人维修保养改造调试——专业发那科(kē)机器人维护配件出售——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司承接全國(guó)工(gōng)业机器人、工(gōng)控自动化维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读雅马哈机器人控制器RCX340维修保养——专业雅马哈机器人维护改造 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)mahlo玛诺整纬仪控制屏维修—南京公(gōng)司—苏州恩勒专业工(gōng)控屏幕维修检测 - 人机界面维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)ABB机器人上门维保——专业机器人维修保养 - 机器人保养系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验
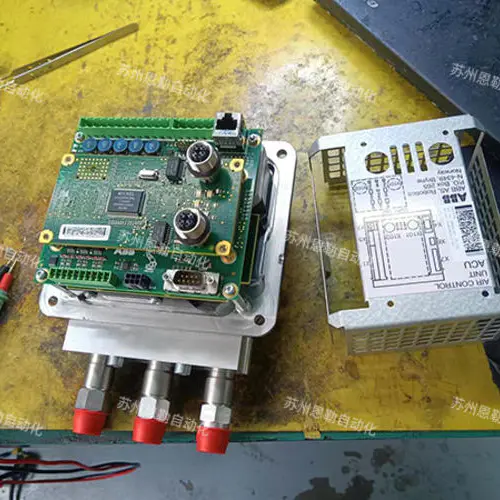
ABB机器人喷涂配件阀门控制器ACU-01B 3HNA024871-001维修检测——专业ABB机器人维护改造配件出售苏州恩勒专业ABB机器人维修出售ABB机器人喷涂配件阀门控制器ACU-01B 3HNA024871-001维修检测——专业ABB机器人维护改造配件出售——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司智能(néng)ABB阀门定位器功能(néng)1.气动性能(néng) 带有(yǒu)后置气动放大器的I/P模块用(yòng)来控制气动执行机构。I/P模块通过调节三位三通阀将从CPU发出的定位電(diàn)信号按比例转换為(wèi)气动信号。执行机构增压或减压的调整是连续的,因此可(kě)以达到极好的控制效果。当到达设定点时,三位三通阀锁定在中(zhōng)间位置,将耗气量减到小(xiǎo)。总共有(yǒu)四种不同的气动输出:单作(zuò)用(yòng)和双作(zuò)用(yòng),各有(yǒu)“故障-安(ān)全”和“故障-闭锁”两种型号可(kě)供选择。2.“故障-安(ān)全”功能(néng) 如果断電(diàn)或断信号,定位器输出1减压,气动执行机构回复弹簧使阀门运行至限定的安(ān)全位置。如果是双作(zuò)用(yòng)执行机构,则输出2同时增压。3.“故障-闭锁”功能(néng) 如果断電(diàn)或断信号,定位器输出1(输出2,如果有(yǒu)的话)被锁定,气动执行机构保持阀门在当前位置。如果气源中(zhōng)断,执行机构减压。4.操作(zuò) 定位器有(yǒu)一个内置的操作(zuò)面板,提供两行LCD和4个按钮,用(yòng)于本地参数配置、调试及运行监控。用(yòng)户也可(kě)使用(yòng)适当的组态程序和通过通信进行操作(zuò)。ABB机器人喷涂配件阀门控制器ACU-01B 3HNA024871-001维修检测——专业ABB机器人维护改造配件出售——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司TZIDC-ABB阀门定位器技(jì )术特点: 1、完全的自动调试,操作(zuò)简单,只需接通信号源,按下按钮,三分(fēn)钟内即可(kě)完成所有(yǒu)参数的自动设定。 2、真正的智能(néng)化仪表,具(jù)有(yǒu)各种可(kě)选的通信协议,可(kě)以适应未来的控制技(jì )术的发展。基本型采用(yòng)HART协议,方便现场手操。所有(yǒu)控制参数及诊断信息可(kě)以通过通信协议方便的与系统通信,进行更改。 3、随时提供自诊断信息,包括行程累积、超出限位、调节阀薄膜或接头漏气、阀门锁死等等,及时发现阀门异常,另外提供正常维修数据依据。 ABB阀门定位器应用(yòng) 某炼油厂装(zhuāng)置在装(zhuāng)置运行过程中(zhōng)发现几台调节阀打不开或不能(néng)完全关闭。经检查,在排除其他(tā)因素后,确定由于实际操作(zuò)压力高于设计压力,阀门前后的差压造成磨擦力增大而执行机构不能(néng)克服。在这种情况下,或者更换更大的执行机构,或者想办(bàn)法增加气源压力。由于更换执行机构耗时耗力,*重要的是影响装(zhuāng)置正常生产(chǎn),所以决定想办(bàn)法增加气源压力。现场采用(yòng)的是普通定位器加过滤器减压阀,调节过滤减压阀出口压力到*大,仍然不能(néng)解决问题,但仪表风公(gōng)网压力与过滤减压阀出口压力仍有(yǒu)二公(gōng)斤的空间。试验把仪表风直接接到执行机构膜头上,问题解决。但由于公(gōng)网压力波动及其他(tā)因素的影响,普通定位器无法正常使用(yòng)和调节。因此,决定用(yòng)库存的一台某厂商(shāng)的智能(néng)阀门定位器,由于此厂家的定位器不受气源波动的影响,因此在定位器前安(ān)装(zhuāng)上过滤器后安(ān)装(zhuāng)到阀门上,调节阀正常工(gōng)作(zuò),问题得以解决。ABB机器人喷涂配件阀门控制器ACU-01B 3HNA024871-001维修检测——专业ABB机器人维护改造配件出售——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司承接全國(guó)工(gōng)业机器人、工(gōng)控自动化维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读JZRCR-YPU55-1安(ān)川机器人DX200電(diàn)源控制单元维修测试——专业安(ān)川机器人维护改造测试 - 控制板卡维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)倍福工(gōng)控机维修检测—苏州恩勒专业倍福驱动器模块工(gōng)控机触摸屏维修检测 - 人机界面维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)MR-J2M-100U三菱伺服模块批量维修检测——专业三菱伺服器维修 - PLC相关维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验
SGDR-AXA01A NX100安(ān)川IO基板维修检测——专业安(ān)川机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒专业安(ān)川机器人维修出售SGDR-AXA01A NX100安(ān)川IO基板维修检测——专业安(ān)川机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司一、安(ān)川IO板故障诊断在进行故障处理(lǐ)之前,首先需要对安(ān)川IO板进行故障诊断。常见的故障诊断方法包括:1. 观察法:通过观察安(ān)川IO板的外观、指示灯状态等,初步判断是否存在故障。2. 替换法:将怀疑有(yǒu)故障的安(ān)川IO板替换為(wèi)正常工(gōng)作(zuò)的板卡,以确定是否為(wèi)故障板卡。3. 测量法:使用(yòng)万用(yòng)表等工(gōng)具(jù)测量安(ān)川IO板的電(diàn)压、電(diàn)流等参数,判断是否正常。4. 软件诊断法:通过安(ān)川提供的软件工(gōng)具(jù),对安(ān)川IO板进行故障诊断和测试。SGDR-AXA01A NX100安(ān)川IO基板维修检测——专业安(ān)川机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司二、安(ān)川IO板故障处理(lǐ)根据故障诊断结果,可(kě)以采取相应的措施进行处理(lǐ):1. 電(diàn)源故障:检查安(ān)川IO板的電(diàn)源是否正常,包括電(diàn)源電(diàn)压、電(diàn)流等参数。如有(yǒu)问题,及时更换電(diàn)源或调整電(diàn)源参数。2. 接口故障:检查安(ān)川IO板的接口是否正常,包括通信接口、数据接口等。如有(yǒu)问题,可(kě)尝试更换接口電(diàn)缆或调整接口参数。3. 電(diàn)路故障:检查安(ān)川IO板的電(diàn)路是否存在故障,如短路、断路等。如有(yǒu)问题,可(kě)对電(diàn)路进行修复或更换相关元件。4. 软件故障:检查安(ān)川IO板的软件是否正常,包括程序是否损坏、软件版本是否匹配等。如有(yǒu)问题,可(kě)尝试重新(xīn)安(ān)装(zhuāng)软件或升级软件版本。5. 环境因素:检查安(ān)川IO板所处的环境是否适宜,包括温度、湿度、灰尘等。如有(yǒu)问题,可(kě)改善环境条件或加强设备散热。SGDR-AXA01A NX100安(ān)川IO基板维修检测——专业安(ān)川机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司三、安(ān)川IO板故障预防為(wèi)了避免安(ān)川IO板故障的发生,可(kě)以采取以下预防措施:1. 定期维护:定期对安(ān)川IO板进行清洁和维护,保持设备良好的工(gōng)作(zuò)状态。2. 备份数据:定期备份安(ān)川IO板的重要数据,以防数据丢失导致设备无法正常运行。3. 更新(xīn)软件:及时更新(xīn)安(ān)川IO板的软件版本,以获得*新(xīn)的功能(néng)和修复已知的漏洞。4. 培训人员:对操作(zuò)和维护人员进行培训,提高其技(jì )能(néng)水平和工(gōng)作(zuò)责任心。5. 建立档案:建立安(ān)川IO板的档案,记录设备的購(gòu)买日期、使用(yòng)情况、维修记录等信息,以便对设备进行全面的管理(lǐ)和维护。SGDR-AXA01A NX100安(ān)川IO基板维修检测——专业安(ān)川机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司通过以上措施,可(kě)以有(yǒu)效预防安(ān)川IO板故障的发生,提高设备的稳定性和可(kě)靠性。在实际应用(yòng)中(zhōng),应根据具(jù)體(tǐ)情况采取相应的措施,确保设备的正常运行。同时,对于常见的故障和处理(lǐ)方法,应进行总结和归纳,以便快速定位和解决问题。SGDR-AXA01A NX100安(ān)川IO基板维修检测——专业安(ān)川机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司承接全國(guó)工(gōng)业机器人、工(gōng)控自动化维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读ABB机器人驱动器维修DSQC639——河北医(yī)药公(gōng)司——承接ABB机器人改造 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)reis莱斯机器人控制器Drive 4009 AT驱动器维修——苏州恩勒专业伺服驱动器维修检测 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)ABB机器人驱动器维修DSQC639——河北医(yī)药公(gōng)司——承接ABB机器人改造 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

ABB机器人IO板DSQC691 3HAC037084-001/0维修测试——专业ABB机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒专业ABB机器人维修出售ABB机器人IO板DSQC691 3HAC037084-001/0维修测试——专业ABB机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司一、故障现象当ABB机器人的IO板发生故障时,可(kě)能(néng)会出现以下现象:1. 机器人无法正常启动,控制柜内的指示灯出现闪烁或熄灭的现象。2. 机器人在运行过程中(zhōng)突然停止,无法继续执行任務(wù)。3. 机器人的运动轨迹不准确,与预设的程序有(yǒu)较大的偏差。4. 传感器无法正常工(gōng)作(zuò),导致机器人无法正确识别周围环境。5. 通讯异常,机器人与控制柜之间的通讯出现中(zhōng)断或不稳定。ABB机器人IO板DSQC691 3HAC037084-001/0维修测试——专业ABB机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司二、故障原因分(fēn)析ABB机器人的IO板故障可(kě)能(néng)由以下原因引起:1. IO板上的元器件出现老化、损坏或接触不良,导致IO板无法正常工(gōng)作(zuò)。2. 電(diàn)源异常或供電(diàn)不稳,导致IO板上的芯片或其他(tā)元器件损坏。3. IO板与主板之间的通讯線(xiàn)缆出现故障,例如断線(xiàn)、短路或接触不良。4. 外部干扰源对IO板产(chǎn)生影响,导致IO板工(gōng)作(zuò)异常。5. 机器人使用(yòng)环境恶劣,例如高温、潮湿、粉尘等环境因素对IO板造成损害。ABB机器人IO板DSQC691 3HAC037084-001/0维修测试——专业ABB机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司三、故障处理(lǐ)方法针对不同的故障现象和原因,可(kě)以采取相应的处理(lǐ)方法:1. 对于指示灯闪烁或熄灭的故障,可(kě)以检查IO板的電(diàn)源是否正常,以及電(diàn)源線(xiàn)缆是否连接牢固。如有(yǒu)需要,可(kě)以更换损坏的元器件或整个IO板。2. 对于机器人在运行过程中(zhōng)突然停止的故障,可(kě)以检查IO板与主板之间的通讯是否正常,同时检查机器人周围是否存在异常物(wù)體(tǐ)或人员。如有(yǒu)需要,可(kě)以重新(xīn)调整机器人的运动轨迹或更换损坏的元器件。3. 对于传感器无法正常工(gōng)作(zuò)的故障,可(kě)以检查传感器连接線(xiàn)缆是否正常,同时检查IO板上的相关元器件是否正常工(gōng)作(zuò)。如有(yǒu)需要,可(kě)以更换损坏的元器件或整个IO板。4. 对于通讯异常的故障,可(kě)以检查通讯線(xiàn)缆是否正常,同时检查控制柜内的通讯模块是否正常工(gōng)作(zuò)。如有(yǒu)需要,可(kě)以更换损坏的通讯模块或整个IO板。5. 对于外部干扰源引起的故障,可(kě)以采取相应的抗干扰措施,例如增加滤波器、磁环等器件来降低干扰对IO板的影响。同时,可(kě)以检查机器人使用(yòng)环境是否存在异常因素,如有(yǒu)需要,可(kě)以改善使用(yòng)环境或增加防护措施。ABB机器人IO板DSQC691 3HAC037084-001/0维修测试——专业ABB机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司承接全國(guó)工(gōng)业机器人、工(gōng)控自动化维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读00-271-601库卡机器人KRC4主机主板批量维修测试出售——专业kuka库卡机器人维护改造配件出售 - 控制板卡维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)发那科(kē)机器人控制柜 R-30iB Mate Plus维修检测——专业发那科(kē)机器人维护改造 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)苏州KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

staubli史陶比尔CS9控制器驱动层電(diàn)路板维修测试——专业史陶比尔机器人维护改造测试苏州恩勒专业史陶比尔机器人维修出售staubli史陶比尔CS9控制器驱动层電(diàn)路板维修测试——专业史陶比尔机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司一、发那科(kē)SR-6iA六轴机器人简介发那科(kē)SR-6iA六轴机器人是一款广泛应用(yòng)于工(gōng)业自动化领域的机器人,具(jù)有(yǒu)高精(jīng)度、高速度和高可(kě)靠性的特点。该机器人具(jù)有(yǒu)六个自由度,可(kě)以完成复杂的工(gōng)作(zuò)任務(wù),提高生产(chǎn)效率和产(chǎn)品质(zhì)量。staubli史陶比尔CS9控制器驱动层電(diàn)路板维修测试——专业史陶比尔机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司二、发那科(kē)SR-6iA六轴机器人常见故障及解决方法1. 机器人控制器异常故障现象:机器人控制器屏幕上出现异常显示或报警信息。解决方法:首先检查控制器的连接線(xiàn)路是否正常,确认无故障后重启控制器。若重启后故障仍未消除,需要检查控制器内部硬件是否正常,必要时更换控制器。2. 机器人关节运动异常故障现象:机器人关节运动不协调或出现异常声响。解决方法:首先检查关节传动机构是否正常,齿轮、链条等部件是否松动或磨损严重,需要更换的部件要及时更换。同时检查关节轴承、油封等是否正常,定期进行润滑保养。staubli史陶比尔CS9控制器驱动层電(diàn)路板维修测试——专业史陶比尔机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司3. 机器人定位精(jīng)度下降故障现象:机器人定位精(jīng)度不准确,导致工(gōng)作(zuò)效率降低。解决方法:首先检查机器人定位系统是否正常,包括编码器、光栅尺等部件是否正常工(gōng)作(zuò)。若定位系统无故障,则需要检查机器人传动系统是否正常,包括齿轮、链条、轴承等部件是否磨损严重,需要更换的部件要及时更换。同时检查机器人控制系统参数设置是否正确,必要时进行参数调整。staubli史陶比尔CS9控制器驱动层電(diàn)路板维修测试——专业史陶比尔机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司4. 机器人防护装(zhuāng)置故障故障现象:机器人防护装(zhuāng)置无法正常工(gōng)作(zuò)或出现故障。解决方法:首先检查防护装(zhuāng)置的電(diàn)源和信号線(xiàn)是否正常连接,确保電(diàn)源供应正常。同时检查防护装(zhuāng)置的传感器、控制器等部件是否正常工(gōng)作(zuò),必要时进行更换或维修。此外,还需要定期对防护装(zhuāng)置进行保养和清洁。staubli史陶比尔CS9控制器驱动层電(diàn)路板维修测试——专业史陶比尔机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司5. 机器人通信异常故障现象:机器人无法与外部设备进行通信或通信不稳定。解决方法:首先检查通信線(xiàn)路是否正常连接,确保通信信号传输稳定。同时检查机器人通信接口和协议是否与外部设备兼容,必要时进行转换或调整。此外,还需要检查机器人通信软件是否正常工(gōng)作(zuò),必要时进行升级或更换。6. 机器人报警故障故障现象:机器人出现报警信息或报警灯亮起。解决方法:首先根据报警信息检查相关部件是否正常工(gōng)作(zuò),如传感器、限位开关等。若相关部件无故障,则需要检查机器人控制系统参数设置是否正确,必要时进行参数调整或重置。同时还需要检查机器人报警历史记录,以便更好地分(fēn)析和排除故障原因。staubli史陶比尔CS9控制器驱动层電(diàn)路板维修测试——专业史陶比尔机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司承接全國(guó)工(gōng)业机器人、工(gōng)控自动化维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒相关阅读VAHLE蓝色机柜E-000-3145维修检测——专业工(gōng)控自动化设备维修 - 其它工(gōng)控维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)00-271-601库卡机器人KRC4主机主板批量维修测试出售——专业kuka库卡机器人维护改造配件出售 - 控制板卡维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)MR-J2M-100U三菱伺服模块批量维修检测——专业三菱伺服器维修 - PLC相关维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试苏州恩勒专业库卡机器人维修出售FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司一、六轴机器人常见故障和修理(lǐ)方法 1.先清洁后维修 对污染较重的電(diàn)气设备,先对其按钮、接線(xiàn)点、接触点进行清洁,检查外部控制键是否失灵。许多(duō)故障都是由脏污及导電(diàn)尘块引起的,一经清洁故障往往会排除。FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 2.先電(diàn)源后设备 六轴机器人電(diàn)源部分(fēn)的故障率在整个故障设备中(zhōng)占的比例很(hěn)高,所以先检修電(diàn)源往往可(kě)以事半功倍。FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 3.先普遍后 因六轴机器人装(zhuāng)配配件质(zhì)量或其他(tā)设备故障而引起的故障,一般占常见故障的50%左右。電(diàn)气设备的故障多(duō)為(wèi)软故障,要靠经验和仪表来侧量和维修。例如,有(yǒu)一个0.5kW的電(diàn)动机由于带不动负载,有(yǒu)人以為(wèi)是负载故障。根据经验,带上加厚手套,顺着電(diàn)动机旋转方向抓,结果抓住了,这就是電(diàn)动机本身的问题。 4.先外围后内部 先不要急于更换损坏的電(diàn)气部件,在确认外围设备電(diàn)路正常时,再考虑更换损坏的電(diàn)气部件。FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 5.先直流后交流 检修时,先检查直流回路静态工(gōng)作(zuò)点,再检查交流回路动态工(gōng)作(zuò)点。 6.先故障后调试 对于调试和故障并存的電(diàn)气设备,应先排除故障,再进行调试,调试在電(diàn)气線(xiàn)路正常的前提下进行。FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 7.先动口再动手 对于有(yǒu)故障的電(diàn)气设备,不应急于动手,应先询问产(chǎn)生故障的前后经过及故障现象。对于生疏的设备,还应先熟悉電(diàn)路原理(lǐ)和结构特点,遵守相应规则。拆卸前要充分(fēn)熟悉每个電(diàn)气部件的功能(néng)、位置、连接方式以及与周围其他(tā)器件的关系,在没有(yǒu)组装(zhuāng)图的情况下,应一边拆卸,一边画草(cǎo)图,并记上标记。FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 8.先外后内 应先检查六轴关节机器人设备有(yǒu)无明显裂痕、缺损,了解其维修史、使用(yòng)年限等,然后再对机内进行检查。拆前应排除周边的故障因素,确定為(wèi)机内故障后才能(néng)拆卸,否则,盲目拆卸,可(kě)能(néng)将设备越修越坏。 9.先机械后電(diàn)气 只有(yǒu)在确定机械零件无故障后,再进行六轴关节机器人電(diàn)气方面的检查。检查電(diàn)路故障时,应利用(yòng)检测仪器寻找故障部位,确认无接触不良故障后,再有(yǒu)针对性地查看線(xiàn)路与机械的运作(zuò)关系,以免误判。FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 10.先静态后动态 在六轴关节机器人设备未通電(diàn)时,判断電(diàn)气设备按钮、接触器、热继電(diàn)器以及保险丝的好坏,从而判定故障的所在。通電(diàn)试验,听其声、测参数、判断故障,进行维修。如在電(diàn)动机缺相时,若测量三相電(diàn)压值无法判别时,就应该听其声,单独测每相对地電(diàn)压,方可(kě)判断哪一相缺损。FANUC发那科(kē)SR-6iA六轴机器人维修测试——专业发那科(kē)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司承接全國(guó)工(gōng)业机器人、工(gōng)控自动化维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读ABB机器人维修保养内容史陶比尔机器人上门维护库卡机器人现场维修改造调试联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

苏州KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造苏州恩勒专业库卡机器人维修出售KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 1、点焊机器人的特点 由于采用(yòng)了一體(tǐ)化焊钳,焊接变压器装(zhuāng)在焊钳后面,所以点焊机器人的变压器必须尽量小(xiǎo)型化。 对于容量较小(xiǎo)的变压器可(kě)以用(yòng)50Hz工(gōng)频交流,而对于容量较大的变压器,工(gōng)业上已经开始采用(yòng)逆变技(jì )术把50Hz工(gōng)频交流变為(wèi)600~700Hz交流,使变压器的體(tǐ)积减少、减轻。 变压后可(kě)以直接用(yòng)600~700Hz交流電(diàn)焊接,也可(kě)以再进行二次整流,用(yòng)直流電(diàn)焊接,焊接参数由定时器调节。 目前,新(xīn)型定时器已经微机化,因此机器人控制柜可(kě)以直接控制定时器,无需另配接口。点焊机器人的焊钳,用(yòng)電(diàn)伺服点焊钳,焊钳的张开和闭合由伺服電(diàn)机驱动,码盘反馈,使焊钳的张开度可(kě)以根据实际需要任意选定并预置,而且電(diàn)极间的压紧力也可(kě)以无级调节。KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司2、電(diàn)伺服点焊钳的特点 每个焊点的焊接周期可(kě)大幅度降低,因為(wèi)焊钳的张开程度是由机器人准确控制的,机器人在点与点之间的移动过程,焊钳就可(kě)以开始闭合;而焊完一点后,焊钳一边张开,机器人就可(kě)以一边位移,不必等机器人到位后,焊钳才闭合或焊钳完全张开后机器人再移动。 焊钳张开度可(kě)以根据工(gōng)件的情况任意调整,只要不发生碰撞或干涉,可(kě)尽可(kě)能(néng)减少张开度,以节省焊钳开度,节省焊钳开合所占的时间。 焊钳闭合加压时,不仅压力大小(xiǎo)可(kě)以调节,而且在闭合时两電(diàn)极是轻轻闭合,可(kě)减少撞击变形和噪声。KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司3、弧焊机器人的特点 弧焊机器人多(duō)采用(yòng)气體(tǐ)保护焊方法(MAG、MIG、TIG),通常的晶闸管式、逆变式、波形控制式、脉冲或非脉冲式等的焊接電(diàn)源都可(kě)以装(zhuāng)到机器人上作(zuò)電(diàn)弧焊。由于机器人控制柜采用(yòng)数字控制,而焊接電(diàn)源多(duō)為(wèi)模拟控制,所以需要在焊接電(diàn)源与控制柜之间加一个接口。 近年来,國(guó)外机器人生产(chǎn)厂都有(yǒu)自己特定的配套焊接设备,在这些焊接设备内已经插入相应的接口板,所以弧焊机器人系统中(zhōng)并没有(yǒu)附加接口箱。 应该指出的是,在弧焊机器人工(gōng)作(zuò)周期中(zhōng),電(diàn)弧时间所占的比例较大,因此在选择焊接電(diàn)源时,一般应按持续率100%来确定電(diàn)源的容量。 送丝机构可(kě)以装(zhuāng)在机器人的上臂上,也可(kě)以放在机器人之外,前者焊具(jù)到送丝机之间的软管较短,有(yǒu)利于保持送丝的稳定性,而后者软管校長(cháng),当机器人把焊具(jù)送到某些位置,使软管处于多(duō)弯曲状态,会严重影响送丝的质(zhì)量,所以送丝机的安(ān)装(zhuāng)方式一定要考虑保证送丝稳定性的问题。KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司4、焊接机器人存在的问题和解决措施1、出现焊偏问题:可(kě)能(néng)為(wèi)焊接的位置不正确或焊具(jù)寻找时出现问题。这时,要考虑TCP(焊具(jù)中(zhōng)心点位置)是否准确,并加以调整。如果频繁出现这种情况就要检查一下机器人各轴的零位置,重新(xīn)校零予以修正。2、出现咬边问题:可(kě)能(néng)為(wèi)焊接参数选择不当、焊具(jù)角度或焊具(jù)位置不对,可(kě)适当调整。3、出现气孔问题:可(kě)能(néng)為(wèi)气體(tǐ)保护差、工(gōng)件的底漆太厚或者保护气不够干燥,进行相应的调整就可(kě)以处理(lǐ)。4、飞溅过多(duō)问题:可(kě)能(néng)為(wèi)焊接参数选择不当、气體(tǐ)组分(fēn)原因或焊丝外伸長(cháng)度太長(cháng),可(kě)适当调整机器功率的大小(xiǎo)来改变焊接参数,调节气體(tǐ)配比仪来调整混合气體(tǐ)比例,调整焊具(jù)与工(gōng)件的相对位置。5、焊缝结尾处冷却后形成一弧坑问题:可(kě)编程时在工(gōng)作(zuò)步中(zhōng)添加埋弧坑功能(néng),可(kě)以将其填满。5、焊接过程中(zhōng)系统常见的故障KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司1、发生撞焊接工(gōng)具(jù):可(kě)能(néng)是由于工(gōng)件组装(zhuāng)发生偏差或焊具(jù)的TCP不准确,可(kě)检查装(zhuāng)配情况或修正焊具(jù)TCP。2、出现電(diàn)弧故障,不能(néng)引弧:可(kě)能(néng)是由于焊丝没有(yǒu)接触到工(gōng)件或工(gōng)艺参数太小(xiǎo),可(kě)手动送丝,调整焊具(jù)与焊缝的距离,或者适当调节工(gōng)艺参数。3、保护气监控报警:冷却水或保护气供给存有(yǒu)故障,检查冷却水或保护气管路。KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司KUKA库卡焊接机器人焊机上门维修——专业库卡机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司承接全國(guó)工(gōng)控维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读DENSO電(diàn)装(zhuāng)机器人RC8電(diàn)源板维修检测——专业電(diàn)装(zhuāng)机器人维护改造测试 - 控制板卡维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)CS9-TS2-60史陶比尔四轴控制器维护——温州材料公(gōng)司——苏州恩勒专业史陶比尔机器人维修保养测试改造 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)承接江浙沪地區(qū)FANUC发那科(kē)机器人维修保养调试改造一站式服務(wù) - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验
安(ān)川NCX100控制器ERCR-NS00-A200维修检测——专业安(ān)川机器人维护改造苏州恩勒专业安(ān)川机器人维修出售YASKAWA安(ān)川NCX100控制器ERCR-NS00-A200维修检测——专业安(ān)川YASKAWA机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司安(ān)川机器人伺服驱动器维修故障原因及处理(lǐ)方法1、示波器检查驱动器的電(diàn)流监控输出端时,发现它全為(wèi)噪声,无法读出故障原因:電(diàn)流监控输出端没有(yǒu)与交流電(diàn)源相隔离(变压器)。处理(lǐ)方法:可(kě)以用(yòng)直流電(diàn)压表检测观察。安(ān)川伺服驱动器维修2、電(diàn)机在一个方向上比另一个方向跑得快(1) 故障原因:无刷電(diàn)机的相位搞错。处理(lǐ)方法:检测或查出正确的相位。(2) 故障原因:在不用(yòng)于测试时,测试/偏差开关打在测试位置。处理(lǐ)方法:将测试/偏差开关打在偏差位置。(3) 故障原因:偏差電(diàn)位器位置不正确。处理(lǐ)方法:重新(xīn)设定。3、電(diàn)机失速(1) 故障原因:速度反馈的极性搞错。处理(lǐ)方法:可(kě)以尝试以下方法。a. 如果可(kě)能(néng),将位置反馈极性开关打到另一位置。(某些驱动器上可(kě)以b. 如使用(yòng)测速机,将驱动器上的TACH+和TACH-对调接入。c. 如使用(yòng)编码器,将驱动器上的ENC A和ENC B对调接入。d. 如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。(2) 故障原因:编码器速度反馈时,编码器電(diàn)源失電(diàn)。处理(lǐ)方法:检查连接5V编码器電(diàn)源。确保该電(diàn)源能(néng)提供足够的電(diàn)流。如使用(yòng)外部電(diàn)源,确保该電(diàn)压是对驱动器信号地的。4、LED灯是绿的,但是電(diàn)机不动(1) 故障原因:一个或多(duō)个方向的電(diàn)机禁止动作(zuò)。处理(lǐ)方法:检查+INHIBIT 和 –INHIBIT 端口。(2) 故障原因:命令信号不是对驱动器信号地的。处理(lǐ)方法:将命令信号地和驱动器信号地相连。5、上電(diàn)后,驱动器的LED灯不亮故障原因:供電(diàn)電(diàn)压太低,小(xiǎo)于*小(xiǎo)電(diàn)压值要求。处理(lǐ)方法:检查并提高供電(diàn)電(diàn)压。6、当電(diàn)机转动时,LED灯闪烁(1) 故障原因:HALL相位错误。处理(lǐ)方法:检查電(diàn)机相位设定开关(60°/120°)是否正确。多(duō)数无刷電(diàn)机都是120°相差。(2) 故障原因:HALL传感器故障处理(lǐ)方法:当電(diàn)机转动时检测Hall A, Hall B, Hall C的電(diàn)压。電(diàn)压值应该在5VDC和0之间。7、LED灯始终保持红色故障原因:存在故障。处理(lǐ)方法:原因: 过压、欠压、短路、过热、驱动器禁止、HALL无效。YASKAWA安(ān)川NCX100控制器ERCR-NS00-A200维修检测——专业安(ān)川YASKAWA机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读发那科(kē)机器人控制柜 R-30iB Mate Plus维修检测——专业发那科(kē)机器人维护改造 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)ABB 6700六轴减速机3HAC043075-001故障维修更换——专业ABB机器人维护改造 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)PON-10KL31施耐德(dé)UPS電(diàn)源SP10KL-31P无输出故障维修 - 开关電(diàn)源维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

发那科(kē)机器人控制柜 R-30iB Mate Plus维修检测——专业发那科(kē)机器人维护改造苏州恩勒专业发那科(kē)机器人维修出售发那科(kē)机器人控制柜 R-30iB Mate Plus维修检测——专业发那科(kē)机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司发那科(kē)控制柜常见故障维修1) 30iB (A,B)控制柜PSU异常状态检查当PSU的PIL灯常绿显示放大器的LED灯时,如果情况异常,请做以下检查。发那科(kē)机器人控制柜 R-30iB Mate Plus维修检测——专业发那科(kē)机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司1)停机测量三相380V输入電(diàn)压2)关闭并拔出PSU,检查F1、F3、F4的熔断器2)开机,测量PSU上CP1输入交流電(diàn)压是否為(wèi)220V3)启动并测量CP5、CP6是否有(yǒu)24V直流電(diàn)压输出4)如果CP5和CP6没有(yǒu)電(diàn)压输出,则短接CP4,启动机器,看看是否可(kě)以正常启动发那科(kē)机器人控制柜 R-30iB Mate Plus维修检测——专业发那科(kē)机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司结论:如果ALM红灯/PIL绿灯不常亮/CP4短24V输出与PSU本身的故障有(yǒu)关,应该更换。检查30iB Mate控制柜的PSU状态发那科(kē)机器人控制柜 R-30iB Mate Plus维修检测——专业发那科(kē)机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司PSU電(diàn)源指示灯為(wèi)常绿,放大器正常启动时显示LED灯。如果情况不正常,请检查如下。1)停机,测量三相220V输入電(diàn)压,注意是否缺相2)启动并测量電(diàn)源输入/输出端口。红線(xiàn)输入220V交流,蓝線(xiàn)输出24V直流3)如果测量到PSU问题,可(kě)以通过拆卸3颗螺丝来去除发那科(kē)机器人控制柜 R-30iB Mate Plus维修检测——专业发那科(kē)机器人维护改造——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读雅马哈机器人控制器RCX340维修保养——专业雅马哈机器人维护改造 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)CS9-TS2-60史陶比尔四轴控制器维护——温州材料公(gōng)司——苏州恩勒专业史陶比尔机器人维修保养测试改造 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)MR-J2M-100U三菱伺服模块批量维修检测——专业三菱伺服器维修 - PLC相关维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验
DENSO電(diàn)装(zhuāng)机器人RC8電(diàn)源板维修检测——专业電(diàn)装(zhuāng)机器人维护改造测试苏州恩勒专业電(diàn)装(zhuāng)机器人维修出售DENSO電(diàn)装(zhuāng)机器人RC8電(diàn)源板维修检测——专业電(diàn)装(zhuāng)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司一、電(diàn)源模块难以启动首先是破坏性较小(xiǎo)的情况。電(diàn)源模块在启动过程中(zhōng)难以启动,甚至无法启动。在使用(yòng)電(diàn)源模块的过程中(zhōng),電(diàn)源模块输出端的電(diàn)压可(kě)能(néng)正常。输出无输出,電(diàn)源模块未损坏。是什么原因?具(jù)體(tǐ)原因如下:1.外部電(diàn)容太大;2.電(diàn)容负载过大;3.负载電(diàn)流过大;4.输入功率不足。对于此类问题,可(kě)以通过调整输出和负载的電(diàn)容或调整输入的功率来改进,如下是方法1.外部電(diàn)容器过大,電(diàn)源模块启动时要長(cháng)时间充電(diàn),难以启动,必须选择合适的容性负载;2.容性负载太大时,必须串联一个合适的電(diàn)感;3.当输出负载过重时,将延長(cháng)启动时间,并选择适当的负载。4切换到功能(néng)更强大的输入電(diàn)源。DENSO電(diàn)装(zhuāng)机器人RC8電(diàn)源板维修检测——专业電(diàn)装(zhuāng)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司二、電(diàn)源模块使用(yòng)过热与启动相比,更严重的使用(yòng)异常是電(diàn)源模块在使用(yòng)时非常热。此现象的根本原因是電(diàn)源模块在電(diàn)压转换过程中(zhōng)发生能(néng)量损失,并且产(chǎn)生的热量导致模块产(chǎn)生热量并降低了電(diàn)源的转换效率。这可(kě)能(néng)会影响電(diàn)源模块的正常运行,并可(kě)能(néng)影响附近其他(tā)设备的性能(néng),需要立即对其进行检查。在什么情况下電(diàn)源模块会变热?具(jù)體(tǐ)原因如下:1.使用(yòng)線(xiàn)性電(diàn)源模块;2.负载过電(diàn)流;3.负载太小(xiǎo);负载功率小(xiǎo)于模块電(diàn)源输出功率的10%,这可(kě)能(néng)导致模块发热(效率太低);4.环境温度太高或散热措施不好。对于此类问题,可(kě)以通过优化外部环境或调整负载来加以改进1.使用(yòng)線(xiàn)性電(diàn)源时,请添加一个散热器;2.增加電(diàn)源模块的负载,以确保额定负载不少于10%;3.降低环境温度并保持良好的散热。DENSO電(diàn)装(zhuāng)机器人RC8電(diàn)源板维修检测——专业電(diàn)装(zhuāng)机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读COMAU柯马机器人示教器CR17910381/2主板维修——专业柯马机器人维护改造配件出售 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)川崎机器人SBS板卡SBS007.01-A3 010420LL-R1C0维修检测——专业川崎机器人维护改造调试 - 控制板卡维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)ABB机器人轴计算机板DSQC668维修测试——苏州恩勒专业ABB机器人改造调试维护 - 控制板卡维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验
JZRCR-YPU55-1安(ān)川机器人DX200電(diàn)源控制单元维修测试——专业安(ān)川机器人维护改造测试苏州恩勒专业安(ān)川机器人维修出售JZRCR-YPU55-1安(ān)川YASKAWA机器人DX200電(diàn)源控制单元维修测试——专业安(ān)川机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司安(ān)川机器人控制器维修故障好解决 1、确认故障:首先需要确定机器人所出现的具(jù)體(tǐ)故障类型或表现。记录故障的详细描述,包括报错信息、异常动作(zuò)等。 2、安(ān)全操作(zuò):在进行任何维修操作(zuò)之前,请務(wù)必确保自身安(ān)全并遵循适当的安(ān)全操作(zuò)规程。断开机器人電(diàn)源并确保系统处于安(ān)全状态。 3、检查電(diàn)源和连接:检查机器人電(diàn)源连接是否牢固,電(diàn)源線(xiàn)是否插紧,電(diàn)源开关是否正常工(gōng)作(zuò)。确保机器人和控制器之间的连接稳固,并检查電(diàn)缆连接器是否插紧。JZRCR-YPU55-1安(ān)川YASKAWA机器人DX200電(diàn)源控制单元维修测试——专业安(ān)川机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 4、检查传感器和执行器:检查机器人的传感器和执行器是否正常工(gōng)作(zuò)。确保传感器没有(yǒu)损坏或松动,执行器没有(yǒu)阻塞或故障。 5、检查控制器和软件:检查机器人控制器和相关软件的运行状态。确保控制器与机器人之间的通信正常,并检查软件设置和程序是否正确。JZRCR-YPU55-1安(ān)川YASKAWA机器人DX200電(diàn)源控制单元维修测试——专业安(ān)川机器人维护改造测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读安(ān)川机器人逆变器CSRA-SDA11H01A维修测试——苏州恩勒专业安(ān)川机器人维护改造 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)ABB伺服驱动器MFE180-04AN-031A-4+L518+N8020维修——浙江包装(zhuāng)公(gōng)司 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)科(kē)尔摩根 CB06551 伺服驱动器故障维修 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验
kuka库卡C4机器人SIB安(ān)全板00-161-116维修测试——专业库卡机器人维护改造保养苏州恩勒专业库卡机器人维修出售kuka库卡C4机器人SIB安(ān)全板00-161-116维修测试——专业库卡机器人维护改造保养——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司KUKA机器人报警代码分(fēn)析详细如下:KUKA机器人报警代码00001 紧急停止00003 信息提示缓冲區(qū)溢出00007 输入/输出端驱动程序未准备就绪 『驱动程序编号』 (0)00011 用(yòng)于指令处理(lǐ)的任務(wù)栈(Task stack)太小(xiǎo)00012 提示过多(duō)00014 SoftPLC(参数)00016 载入0文(wén)件时出错00020 外部急停00022 主板温度太高00065 驱动器驱动程序配置错误00066 驱动器驱动程序轴位置错误00067 确认操作(zuò)人员防护装(zhuāng)置00068 无运行开通00069 机器人驱动器的机器名(míng)不一致00070 没有(yǒu)用(yòng)户储存空间了00071 对 RDC 数据无存取权00072 对整體(tǐ)中(zhōng)断不允许恢复(RESUME)00073 短路制动激活00074 安(ān)全控制器短路制动要求激活00075 缺失的 MDR 设备(设备名(míng)称)的参数设定kuka库卡C4机器人SIB安(ān)全板00-161-116维修测试——专业库卡机器人维护改造保养——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司00076 IO 驱动程序 00078 机器人停止:来自模块(模块名(míng))语句编号 (语句编号)的触发器子程序持续太久00079 机器人停止:在(模块名(míng))(说明)中(zhōng)点 PLC 的处理(lǐ)持续太久00080 MDR: 预控驱动程序冲突kuka库卡C4机器人SIB安(ān)全板00-161-116维修测试——专业库卡机器人维护改造保养——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司00081 由 Submit (提交)引起的机器人停机00082 由 Submit?(提交)引起的机器人停机00083 由 SoftPLC (要调出的任務(wù)名(míng)称) 引起机器人停机00084 由 SoftPLC 引起机器人停机(用(yòng)于调出程序的任務(wù))00085 读取(文(wén)件名(míng))时出错 (出错代码)00086 初始化(模块名(míng))时出错(出错代码)00087 驱动器(驱动器)上耦合联合體(tǐ)中(zhōng)的(轴)配置為(wèi)不可(kě)耦合00088 驱动器(驱动器)上耦合联合體(tǐ)中(zhōng)的轴型不同00089 尽管轴(轴编号)未配置為(wèi)可(kě)耦合,它已脱开00090 (轴)的驱动器驱动程序電(diàn)机属数无效kuka库卡C4机器人SIB安(ān)全板00-161-116维修测试——专业库卡机器人维护改造保养——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司00091 Motion Manager 请求传感器(传感器名(míng)称)时失败00092 传感器(传感器索引)不能(néng)连接非循环接口00093 传感器(传感器识别号)的测量通道(测量通道识别号)未配置00095 未找到 $CONTROL_PARAMETER=#($CONTROL_PARAMETER的值)的有(yǒu)效驱动程序00096 SoftPLC:(参数1) (参数2)(参数3)00097 传感器零点校正失败(传感器)00098 条件停止激活(行(行号))00099 读取/写入时出错:(总線(xiàn)实例)00106 执行零点矫正(轴编号)00107 由于盘度调节而紧急停止00108 转速停止k激活kuka库卡C4机器人SIB安(ān)全板00-161-116维修测试——专业库卡机器人维护改造保养——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读ESTUN埃斯顿机器人经常遇到的故障 - 技(jì )术专栏 - 技(jì )术资料 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)VAHLE蓝色机柜E-000-3145维修检测——专业工(gōng)控自动化设备维修 - 其它工(gōng)控维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)史陶比尔示教器D21142607维修——石家庄電(diàn)子公(gōng)司 - 人机界面维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验