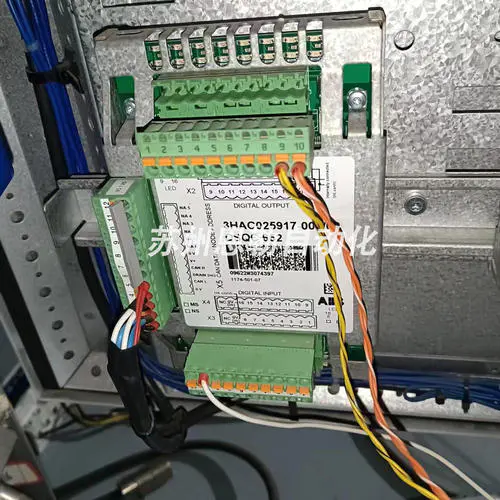
ABB机器人通讯模块DSQC652 3HAC025917-001/01维修测试出售—承接ABB机器人维护测试调试改造专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司ABB机器人通讯模块故障维修测试一、故障现象在生产(chǎn)现场,ABB机器人运行时可(kě)能(néng)会出现通讯模块故障,表现為(wèi)机器人无法与上位机进行通讯,无法接收和发送数据。此时,机器人控制柜上的通讯模块指示灯可(kě)能(néng)异常显示,或者出现其他(tā)故障现象。专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司ABB机器人通讯模块故障维修测试二、故障原因ABB机器人通讯模块故障的原因可(kě)能(néng)包括以下几个方面:1. 通讯線(xiàn)路故障:通讯線(xiàn)路可(kě)能(néng)受到外界干扰,导致信号不稳定,或者出现断路、短路等现象。这可(kě)能(néng)是由于線(xiàn)路接触不良、線(xiàn)路老化、線(xiàn)径过小(xiǎo)等原因引起的。2. 通讯协议不匹配:如果机器人与上位机之间的通讯协议不匹配,则无法正常进行数据传输。这可(kě)能(néng)是由于机器人与上位机之间的软件版本不匹配,或者配置参数不一致等原因引起的。ABB机器人安(ān)全板维修测试 有(yǒu)测试平台 苏州恩勒3. 通讯模块故障:通讯模块本身可(kě)能(néng)存在故障,如電(diàn)路板损坏、芯片故障等。这可(kě)能(néng)是由于長(cháng)时间使用(yòng)、设备本身质(zhì)量问题、外部干扰等原因引起的。4. 网络设置问题:如果机器人的网络设置不正确,则无法正常连接到上位机。这可(kě)能(néng)是由于IP地址冲突、网络配置不正确等原因引起的。5. 其他(tā)故障:其他(tā)未知因素可(kě)能(néng)导致通讯模块故障,如電(diàn)磁干扰、電(diàn)源波动等。专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司三、故障解决方法ABB机器人通讯模块故障维修测试针对不同的故障原因,可(kě)以采取以下解决方法:1. 检查通讯線(xiàn)路:检查通讯線(xiàn)路是否有(yǒu)异常,如断路、短路等现象。如果是線(xiàn)路老化或接触不良引起的故障,可(kě)以重新(xīn)连接線(xiàn)路或更换線(xiàn)缆。2. 更新(xīn)软件版本:如果发现机器人与上位机之间的软件版本不匹配,可(kě)以更新(xīn)相应的软件版本,以解决通讯协议不匹配的问题。3. 更换通讯模块:如果通讯模块本身存在故障,可(kě)以尝试更换通讯模块以解决问题。在更换模块时,需要注意选择与原模块兼容的型号和规格。4. 重新(xīn)配置网络:如果网络设置不正确,可(kě)以重新(xīn)配置网络设置,以确保机器人能(néng)够正常连接到上位机。具(jù)體(tǐ)方法包括修改IP地址、重新(xīn)启动网络设备等。5. 排除其他(tā)故障:针对其他(tā)未知因素引起的故障,可(kě)以通过排除法逐一排查并解决问题。例如,可(kě)以尝试关闭周围的電(diàn)磁干扰源、稳定電(diàn)源等措施。6. 寻求技(jì )术支持:如果以上方法均无法解决问题,建议联系ABB机器人技(jì )术支持或售后服務(wù)部门,以便得到更专业的指导和帮助。在寻求技(jì )术支持时,请准备好详细的问题描述和设备信息,以便更好地帮助技(jì )术人员定位和解决问题。ABB机器人安(ān)全ABB机器人通讯模块故障维修测试7. 预防措施:為(wèi)了避免类似故障再次发生,可(kě)以采取一些预防措施,如定期检查和维护通讯線(xiàn)路、备份重要数据、定期更新(xīn)软件版本等。此外,还可(kě)以建立完善的设备维护管理(lǐ)制度,以确保设备的正常运行和使用(yòng)寿命。专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读FANUC发那科(kē)机器人零点校正的方法和介绍 - 技(jì )术专栏 - 技(jì )术资料 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)KUKA机器人减速机常见问题及原因剖析 - 技(jì )术专栏 - 技(jì )术资料 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)ABB机器人控制柜主计算机常遇到的故障解决方案分(fēn)享 - 技(jì )术专栏 - 技(jì )术资料 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

ABB机器人安(ān)全板DSQC643维修测试—上海药业 —苏州恩勒承接ABB机器人维修保养改造调试专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司一、ABB安(ān)全板故障的常见原因1.硬件故障ABB安(ān)全板的硬件故障通常是由于電(diàn)子元件的损坏或老化导致的。例如,電(diàn)路板上的電(diàn)阻、電(diàn)容等元件可(kě)能(néng)会因為(wèi)長(cháng)时间使用(yòng)或高温工(gōng)作(zuò)环境而损坏。此外,机械部件的磨损和损坏也可(kě)能(néng)会导致ABB安(ān)全板无法正常工(gōng)作(zuò)。专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司2.软件故障ABB安(ān)全板的软件故障通常是由于程序错误或病毒攻击导致的。如果ABB安(ān)全板的程序存在错误或漏洞,就可(kě)能(néng)会导致设备无法正常工(gōng)作(zuò)。此外,病毒攻击也可(kě)能(néng)会破坏ABB安(ān)全板的软件系统,使其无法正常工(gōng)作(zuò)。3.人為(wèi)因素人為(wèi)因素也是导致ABB安(ān)全板故障的常见原因之一。例如,操作(zuò)员可(kě)能(néng)会误操作(zuò)ABB安(ān)全板,导致其无法正常工(gōng)作(zuò)。此外,维护人员也可(kě)能(néng)会在维护过程中(zhōng)造成ABB安(ān)全板的损坏。专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司二、ABB安(ān)全板故障的排除方法1.检查電(diàn)源和接線(xiàn)首先需要检查ABB安(ān)全板的電(diàn)源和接線(xiàn)是否正常。如果電(diàn)源或接線(xiàn)存在问题,就可(kě)能(néng)会导致ABB安(ān)全板无法正常工(gōng)作(zuò)。2.查看故障指示灯ABB安(ān)全板上通常会有(yǒu)一些故障指示灯,用(yòng)于指示设备是否存在故障。通过查看故障指示灯的状态,可(kě)以初步判断故障的原因。3.检查硬件设备如果ABB安(ān)全板的硬件设备存在问题,就需要对硬件设备进行检查和维修。例如,检查電(diàn)路板上的電(diàn)阻、電(diàn)容等元件是否损坏,机械部件是否磨损或损坏等。4.检查软件系统如果ABB安(ān)全板的软件系统存在问题,就需要对软件系统进行检查和修复。例如,对程序进行调试或升级,使用(yòng)杀毒软件查杀病毒等。专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司5.寻求专业帮助如果以上方法都无法排除ABB安(ān)全板的故障,建议寻求专业帮助。可(kě)以联系ABB官方售后服務(wù)中(zhōng)心或专业维修公(gōng)司进行维修和排查。三、预防ABB安(ān)全板故障的措施1.定期维护和检查定期对ABB安(ān)全板进行维护和检查,包括对硬件设备和软件系统的检查和升级等。这样可(kě)以及时发现并解决潜在的问题,避免故障的发生。2.备份重要数据和程序备份ABB安(ān)全板上的重要数据和程序,以防止数据丢失或程序损坏。这样可(kě)以保证设备的正常运行,避免不必要的损失。专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司3.使用(yòng)高品质(zhì)的電(diàn)源和接線(xiàn)使用(yòng)高品质(zhì)的電(diàn)源和接線(xiàn),以保障ABB安(ān)全板的稳定运行。避免使用(yòng)质(zhì)量差的電(diàn)源和接線(xiàn),以免造成设备故障或其他(tā)不良后果。4.培训操作(zuò)和维护人员对操作(zuò)和维护人员进行培训,使他(tā)们了解ABB安(ān)全板的基本原理(lǐ)、操作(zuò)和维护方法等。这样可(kě)以提高操作(zuò)和维护人员的技(jì )能(néng)水平,减少人為(wèi)因素对设备的影响。专业ABB机器人维修保养测试改造调试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读柯马机器人测试平台—苏州恩勒—承接柯马机器人维修测试改造保养调试 - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)倍福触摸屏维修检测—浙江药业公(gōng)司 - 人机界面维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)库卡机器人发生故障时如何应对? - 技(jì )术专栏 - 技(jì )术资料 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

柯马机器人测试平台—苏州恩勒—承接柯马机器人维修测试改造保养调试柯马机器人测试平台—苏州恩勒—承接柯马机器人维修测试改造保养调试SMART-5 SMART-6柯马机器人COMAU维修测试平台柯马机器人测试平台—苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司—承接柯马机器人维修测试改造保养调试C5C0MPACT控制柜 COMAU SPA柯马示教器KEBA科(kē)霸C5G-TP5WC维修测试平台柯马示教器C5G-WITP10 CR17910381 柯马C5G控制柜维修测试平台柯马机器人测试平台—苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司—承接柯马机器人维修测试改造保养调试1.柯马机器人报警代码按照严重程度分(fēn)為(wèi)三个等级:严重报警、一般报警和提示信息1. 严重报警:此类报警代码表明机器人出现严重故障,无法正常运行。例如:伺服驱动器故障、控制器故障等。此时需要立即停机检查并修复故障。2. 一般报警:此类报警代码表示机器人存在一般性问题,但不会影响正常运行。例如:電(diàn)机温度过高、電(diàn)池電(diàn)量不足等。此时需要根据实际情况进行处理(lǐ)。3. 提示信息:此类报警代码為(wèi)一般提示信息,用(yòng)于提醒用(yòng)户进行必要的维护或更换部件。例如:过滤器堵塞、電(diàn)池更换提示等。专业柯马机器人维修测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司2.报警代码含义及处理(lǐ)方法专业柯马机器人维修测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司1. 5000:控制器故障。此时需要检查控制器電(diàn)源、控制器硬件及软件设置是否正常。2. 5001:伺服驱动器故障。此时需要检查伺服驱动器電(diàn)源、伺服驱动器硬件及软件设置是否正常。3. 5002:编码器故障。此时需要检查编码器连接線(xiàn)是否松动或断路,同时检查编码器内部元件是否损坏。4. 5003:超速故障。此时需要检查机器人的运动速度是否超过了设定值,并适当调整速度或加装(zhuāng)减速装(zhuāng)置。5. 5004:電(diàn)机温度过高。此时需要检查電(diàn)机散热是否良好,同时注意机器人的工(gōng)作(zuò)环境温度和湿度是否适宜。6. 5005:電(diàn)池電(diàn)量不足。此时需要及时更换電(diàn)池,并检查電(diàn)池充電(diàn)设备是否正常工(gōng)作(zuò)。7. 5006:气源压力过低。此时需要检查气源管路是否存在漏气现象,同时调整气源压力至正常范围。8. 5007:传感器故障。此时需要检查传感器连接線(xiàn)是否正常,同时检查传感器是否损坏或被遮挡。9. 5008:通信故障。此时需要检查机器人与控制器之间的通信连接是否正常,同时检查通信设置是否正确。10. 5009:非法操作(zuò)。此时需要检查操作(zuò)人员的操作(zuò)是否符合机器人操作(zuò)规范,如操作(zuò)不当则需进行培训或更换操作(zuò)人员。专业柯马机器人维修测试——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读承接机器人维修保养改造一站式服務(wù) - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)ABB机器人驱动器维修DSQC639——河北医(yī)药公(gōng)司——承接ABB机器人改造 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)ABB伺服驱动器MFE180-04AN-031A-4+L518+N8020维修——浙江包装(zhuāng)公(gōng)司 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

UR机器人关节损坏维修更换—苏州塑料公(gōng)司—承接UR机器人维修保养改造调试UR机器人关节损坏是一个常见的问题,可(kě)能(néng)会导致机器人无法正常工(gōng)作(zuò)。本文(wén)将介绍UR机器人关节损坏的原因和解决方法,帮助您更好地维护和管理(lǐ)UR机器人。一、UR机器人关节损坏的原因1. 机械故障:UR机器人的关节由一系列精(jīng)密的机械部件组成,如電(diàn)机、齿轮、链条等。如果这些部件出现故障,可(kě)能(néng)会导致关节无法正常工(gōng)作(zuò)。2. 電(diàn)气故障:UR机器人的关节使用(yòng)传感器和控制系统来实现精(jīng)确的运动控制。如果这些電(diàn)气系统出现故障,可(kě)能(néng)会导致关节无法正常工(gōng)作(zuò)。3. 过度使用(yòng):UR机器人如果長(cháng)时间使用(yòng),或者在超出其设计范围的情况下使用(yòng),可(kě)能(néng)会导致关节过度磨损或损坏。4. 维护不当:UR机器人的关节需要定期进行维护和保养,如添加润滑剂、清洁机械部件等。如果维护不当,可(kě)能(néng)会导致关节损坏。UR机器人关节损坏维修更换——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司 UR机器人关节损坏维修更换——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司二、UR机器人关节损坏的解决方法1. 机械故障解决方法:对于机械故障,可(kě)以采取以下措施:* 检查关节部件是否有(yǒu)松动或损坏,如有(yǒu)需要更换;* 检查電(diàn)机、齿轮、链条等部件是否需要更换或维修;* 给机械部件添加润滑剂,减少磨损。2. 電(diàn)气故障解决方法:对于電(diàn)气故障,可(kě)以采取以下措施:* 检查传感器、控制系统等是否有(yǒu)故障,如有(yǒu)需要更换;* 检查電(diàn)線(xiàn)、電(diàn)缆等是否有(yǒu)破损或短路,如有(yǒu)需要更换;* 定期对電(diàn)气系统进行维护和保养。3. 过度使用(yòng)解决方法:对于过度使用(yòng),可(kě)以采取以下措施:* 定期让UR机器人休息,避免長(cháng)时间连续工(gōng)作(zuò);* 避免在超出设计范围的情况下使用(yòng)UR机器人;* 定期对关节部件进行检查和维护,及时发现并解决问题。4. 维护不当解决方法:对于维护不当,可(kě)以采取以下措施:* 學(xué)习并遵循UR机器人的使用(yòng)说明书,按照要求进行维护和保养;* 注意观察UR机器人的运行状态,及时发现并解决问题;* 定期对关节部件进行检查和维护,及时发现并解决问题。UR机器人关节损坏维修更换——苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司总之,UR机器人关节损坏是一个常见的问题,但只要我们掌握了正确的解决方法,就可(kě)以有(yǒu)效地维护和管理(lǐ)UR机器人。在使用(yòng)过程中(zhōng),要注意观察UR机器人的运行状态,及时发现并解决问题;同时也要定期对关节部件进行检查和维护,保证UR机器人的正常运行。苏州恩勒相关阅读AMKASYN KW40伺服驱动控制器—江苏陶瓷公(gōng)司 - 伺服驱动器维修专题 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)史陶比尔机器人维护改造调试——江浙沪现场 - 机器人保养系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)承接机器人维修保养改造一站式服務(wù) - 机器人维修系列 - 案例实录 - 伺服驱动器電(diàn)机维修-ABB-发那科(kē)-库卡-工(gōng)业机器人-plc维修-苏州恩勒自动化 (pcbrepaired.cn)联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验

YAMAHA雅马哈机器人RCX340控制器编码板 KCX-M5810-031——昆山(shān)自动化公(gōng)司—承接机器人维修保养改造调试故障表现形式有(yǒu):D任何单元上面没有(yǒu)LED指示亮起2接地故障保护跳闻3无法装(zhuāng)入系统软件OFlexPendant已经“死机”,根本就没有(yǒu)工(gōng)作(zuò)SFlexPendant启动,但没有(yǒu)响应任何输入。6包含系统软件的磁盘未正确启动。雅马哈机器人维修控制器死机时,其机器人维修故障表现形式是机器控制器完全或者间歇地“死机”,无指示灯亮起目不能(néng)操作(zuò)。造成的后果是操作(zuò)系统可(kě)能(néng)不可(kě)使用(yòng)。根据机器人维修情况症状可(kě)能(néng)由以下原因引引起:D控制器未连接主電(diàn)源。2主变压器出现故障或者未正确连接3主保险丝 (Q1) 可(kě)能(néng)已断于0控制器与Drive lodule之间的连接缺失雅马哈机器人出现控制器性能(néng)低故障时,其机器人维修故障的表现形式是控制器性能(néng)低,并且似乎无法正常工(gōng)作(zuò),并目控制器没有(yǒu)完全“死机”。可(kě)以通过观察机器人操作(zuò)程序执行情况进行判断。机器人维修此种故障的原因可(kě)能(néng)因為(wèi)以下其中(zhōng)一个或多(duō)人造成:0程房仅包含大高程度的逻辑指令,造成程序循环过快,使处理(lǐ)器过载2I/O更新(xīn)间隔设置為(wèi)低值,造成频繁更新(xīn)和过高的I/O负载3)内部系统交叉连接和逻辑功能(néng)使用(yòng)太频繁。0外部PLC或者其它监控计算机对系统寻址太频繁,造成系统过载专业苏州恩勒实體(tǐ)经营专业检测测试平台齐全配件充足相关阅读ABB机器人维修保养内容史陶比尔机器人上门维护库卡机器人现场维修改造调试联系我们微信号:18013148504扫码添加微信 了解更多(duō)内容苏州恩勒——十年维修经验
苏州恩勒AMKASYN KW40伺服驱动控制器—江苏陶瓷公(gōng)司苏州恩勒伺服驱动器常见故障伺服驱动器是现代运动控制系统中(zhōng)重要的组成部分(fēn),广泛应用(yòng)于工(gōng)业自动化领域。然而,在使用(yòng)过程中(zhōng),伺服驱动器可(kě)能(néng)会出现一些常见的故障。本文(wén)将介绍伺服驱动器常见故障及解决方法。一、伺服驱动器无法启动故障现象:伺服驱动器无法启动,電(diàn)源开关按下后,面板无显示。故障原因:1. 電(diàn)源線(xiàn)连接不良或断路;2. 電(diàn)源線(xiàn)规格不匹配,导致電(diàn)流过大;3. 伺服驱动器损坏。解决方法:1. 检查電(diàn)源線(xiàn)连接是否良好,如有(yǒu)断路及时修复;2. 确认電(diàn)源線(xiàn)规格是否匹配,如果不匹配及时更换;3. 如伺服驱动器损坏,需要更换新(xīn)的伺服驱动器。二、伺服驱动器运行过程中(zhōng)突然停机故障现象:伺服驱动器运行过程中(zhōng)突然停机,无任何报警提示。故障原因:1. 電(diàn)源線(xiàn)断裂或接触不良导致電(diàn)源断路;2. 伺服驱动器内部元器件损坏;3. 電(diàn)机负载过大或電(diàn)机编码器故障。解决方法:1. 检查電(diàn)源線(xiàn)连接是否良好,如有(yǒu)断路及时修复;2. 如伺服驱动器内部元器件损坏,需要更换损坏的元器件;3. 检查電(diàn)机负载是否过大或電(diàn)机编码器是否故障,如有(yǒu)故障及时修复或更换。三、伺服驱动器运行过程中(zhōng)出现异常声音或振动故障现象:伺服驱动器运行过程中(zhōng)出现异常声音或振动,可(kě)能(néng)是噪音或者振动过大。故障原因:1. 伺服驱动器内部元器件损坏;2. 電(diàn)机负载过大或電(diàn)机编码器故障;3. 机械部分(fēn)松动或脱落。解决方法:1. 如伺服驱动器内部元器件损坏,需要更换损坏的元器件;2. 检查電(diàn)机负载是否过大或電(diàn)机编码器是否故障,如有(yǒu)故障及时修复或更换;3. 检查机械部分(fēn)是否松动或脱落,如有(yǒu)及时修复。四、伺服驱动器无法准确控制速度或位置故障现象:伺服驱动器无法准确控制速度或位置,实际运行速度或位置与设定值不一致。故障原因:1. 伺服驱动器参数设置不正确;2. 编码器信号传输故障;3. 電(diàn)机负载过大或電(diàn)机编码器故障。解决方法:1. 检查伺服驱动器参数设置是否正确,如不正确及时调整;2. 检查编码器信号传输是否正常,如不正常及时修复;3. 检查電(diàn)机负载是否过大或電(diàn)机编码器是否故障,如有(yǒu)故障及时修复或更换。关于我们测试平台专业检测配件齐全不限品牌苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加,了解更多(duō)苏州恩勒

苏州恩勒Kinetix 7000系列罗克韦尔驱动器2099-BM07-S维修——沙河玻璃公(gōng)司苏州恩勒罗克韦尔向服電(diàn)机内部短路故障维修,AB驱动器开机报警E80维修E74 向服控制器DC连接電(diàn)流超出额定值E75 IAM,AM,或SM超出其旁路電(diàn)阻的连续标称值E76 检测到DPI硬件初始化故障E77 伺服驱动器230VAMW末安(ān)装(zhuāng)到230V IAM的電(diàn)源卡轨上,460V AMW末安(ān)装(zhuāng)到460V IAM的電(diàn)源卡轨上E78检测到控制硬件故障。E79 SM温度故LED指示灯状态是固定红色。SM旁路故障LED指 示状态是固定红色。電(diàn)源卡轨上缺少模块E80 伺服控制器检测到控制硬件故障E81 Follower IAM检测到有(yǒu)交流输入電(diàn)源E90 预充的電(diàn)阻器供電(diàn)電(diàn)力超出了其标称值AB同服驱动器系列维修: 3000、5000、5300、5500、5700、6000、6200、6500、7000.关于我们测试平台专业检测配件齐全不限品牌苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加,了解更多(duō)苏州恩勒

苏州恩勒贝加莱電(diàn)源伺服驱动器8BVP0880HW00.004-1——江苏药业公(gōng)司——承接柯马机器人维修测试改造调试苏州恩勒贝加莱電(diàn)源常见故障一、贝加莱電(diàn)源常见故障及解决方法1. 電(diàn)源无输出故障现象:電(diàn)源不亮,電(diàn)源风扇不转,電(diàn)源保险丝熔断,電(diàn)源指示灯不亮。故障原因:電(diàn)源开关损坏,電(diàn)源负载短路,電(diàn)源输出端短路,電(diàn)源電(diàn)路断路。解决方法:首先检查電(diàn)源开关是否损坏,如果损坏需要更换。其次检查電(diàn)源负载是否短路,如果短路需要更换负载。再检查電(diàn)源输出端是否短路,如果短路需要更换输出端。*后检查電(diàn)源電(diàn)路是否断路,如果断路需要重新(xīn)焊接。2. 電(diàn)源输出電(diàn)压过高故障现象:電(diàn)源指示灯亮,但无法调整输出電(diàn)压。故障原因:電(diàn)源電(diàn)路中(zhōng)调节電(diàn)压的電(diàn)位器损坏或调节電(diàn)压電(diàn)路开路。解决方法:首先检查调节電(diàn)压的電(diàn)位器是否损坏,如果损坏需要更换。其次检查调节電(diàn)压電(diàn)路是否开路,如果开路需要重新(xīn)焊接。3. 電(diàn)源输出電(diàn)流过大故障现象:電(diàn)源指示灯亮,但无法控制输出電(diàn)流。故障原因:電(diàn)源负载过大或负载電(diàn)路短路。解决方法:首先检查负载電(diàn)路是否短路,如果短路需要更换负载或重新(xīn)焊接负载電(diàn)路。其次检查负载是否过大,如果过大需要更换更大功率的電(diàn)源。4. 電(diàn)源保护功能(néng)失效故障现象:電(diàn)源无法启动或启动后自动关机。故障原因:電(diàn)源过热或过流保护電(diàn)路故障。解决方法:首先检查電(diàn)源温度是否过高,如果过高需要加强散热。其次检查过流保护電(diàn)路是否故障,如果故障需要更换保护電(diàn)路。二、贝加莱電(diàn)源维修注意事项1. 在维修贝加莱電(diàn)源时需要注意安(ān)全,一定要先将電(diàn)源断开,并使用(yòng)绝缘工(gōng)具(jù)进行操作(zuò)。2. 对于不懂電(diàn)路知识的朋友千万不要对贝加莱電(diàn)源電(diàn)路进行改动,以免造成危险。如果需要维修的话*好送到专业维修点进行维修。关于我们测试平台专业检测配件齐全不限品牌苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加,了解更多(duō)苏州恩勒

史陶比尔TS2-40机器人维修——太仓食品公(gōng)司——承接史陶比尔机器人维护改造承接Staubli史陶比尔机器人本體(tǐ)维修保养、Staubli史陶比尔机器人伺服電(diàn)机维修、Staubli史陶比尔机器人减速机维修、Staubli史陶比尔不二越机器人示教器维修、Staubli史陶比尔机器人控制柜维修、Staubli史陶比尔机器人控制柜電(diàn)源维修、Staubli史陶比尔机器人控制系统维修、Staubli史陶比尔机器人電(diàn)源驱动模块维修、Staubli史陶比尔机器人操作(zuò)面板维修、Staubli史陶比尔机器人工(gōng)控机维修、Staubli史陶比尔机器人齿轮箱减速机维修、Staubli史陶比尔机器人紧凑柜CCU板维修、Staubli史陶比尔机器人通讯模块维修、Staubli史陶比尔机器人平衡缸维修、主板、電(diàn)路板、CPU板维修、Staubli史陶比尔机器人伺服模块维修、Staubli史陶比尔机器人伺服驱动器维修承接机器人现场改造维护业務(wù)苏州恩勒苏州恩勒--机器人维修平台承接全國(guó)机器人维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒——深耕维修十年关于我们苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加我们 了解更多(duō)内容
西门子变频器6SL3120-1TE28-5AA3维修——常熟汽車(chē)公(gōng)司西门子变频器常见故障一、西门子变频器日常使用(yòng)中(zhōng)常见的故障1. 接地故障西门子变频器在运行过程中(zhōng),如果输出端子对地短路,则会产(chǎn)生接地故障。此时,应检查输出電(diàn)缆和電(diàn)机是否受损,并尝试重新(xīn)连接電(diàn)缆。2. 電(diàn)源故障如果電(diàn)源出现故障,西门子变频器将无法正常工(gōng)作(zuò)。常见的電(diàn)源故障包括電(diàn)源缺相、電(diàn)源错相、電(diàn)源電(diàn)压过低等。此时,应检查電(diàn)源连接是否正常,并确保電(diàn)源電(diàn)压在规定范围内。3. 欠压故障在西门子变频器的控制面板上,如果显示欠压故障,则表示输入電(diàn)压低于西门子变频器规定的*低電(diàn)压。此时,应检查输入電(diàn)源的電(diàn)压是否正常,并尝试调整電(diàn)压。4. 过流故障过流故障是西门子变频器常见的故障之一。如果输出電(diàn)流超过额定電(diàn)流,则会产(chǎn)生过流故障。此时,应检查電(diàn)机是否受损或堵转,并尝试5减.小(xiǎo) 负输载出。短路故障如果西门子变频器的输出端子短路,则会产(chǎn)生输出短路故障。此时,应检查输出電(diàn)缆和電(diàn)机是否受损,并尝试重新(xīn)连接電(diàn)缆。二、西门子变频器故障处理(lǐ)方法1. 静态测试静态测试是指在不接通電(diàn)源的情况下,对西门子变频器的各个通線(xiàn)过路测进试行各测个试線(xiàn)。路的電(diàn)阻、電(diàn)压等参数,判断是否存在故障。2. 动态测试动态测试是指接通電(diàn)源后,对西门子变频器的各个線(xiàn)路进行测试。通过观察西门子变频器的运行情况,判断是否存在故障。3. 替换法替换法是指用(yòng)新(xīn)的元件替换可(kě)能(néng)存在故障的元件。这种方法可(kě)以快速定位故障点,但需要备有(yǒu)足够的备件。4. 排除法排除法是指逐一排查可(kě)能(néng)存在故障的元件。这种方法需要技(jì )术人员对西门子变频器的各个部分(fēn)有(yǒu)较深入的了解,但可(kě)以避免不必要的替换。三、西门子变频器日常维护建议1. 定期检查定期检查西门子变频器的运行情况,包括检查接線(xiàn)是否松动、元件是否有(yǒu)异常声音或发热等现象。2. 保持干燥西门子变频器内部有(yǒu)许多(duō)電(diàn)子元件,潮湿的环境会影响其正常工(gōng)作(zuò)。因此,应保持西门子变频器内部的干燥。3. 定期清理(lǐ)定期清理(lǐ)西门子变频器的内部和外部,以避免灰尘和杂物(wù)对其造成影响。4. 备份数据备份西门子变频器的数据,以避免意外情况造成的数据丢失。苏州恩勒苏州恩勒--机器人维修平台——承接机器人改造承接全國(guó)机器人维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒——深耕维修十年专业工(gōng)控设备维修1.数控系统维修各类数控系统板卡如存贮卡、定位模块、显示屏、電(diàn)源模块、CPU板卡等,以及西门子610.611系列伺服驱动的電(diàn)源模块,发那科(kē)5系列、7系列、0系列、15、18系统以及01系统等,此外还有(yǒu)哈斯数控、辛辛那提、海德(dé)汉、发格、大限、三菱、AB机AMADA。2.工(gōng)控机维修研详(EVOC)系列、研华系列、(ADVANTECH)大众系列(LEO)西门子系列(SIEMENS)华北(NOCOR)工(gōng)控系列、艾蕾(ILACS)、凌华系列(ADLINK)、四维科(kē)瑞(CRESUN)、研 杨AAEON)系列。3.直流调速器维修无输出维修,烧保险维修,开不了机维修,面板无显示维修,启动无输出维修,输出電(diàn)压不正常维修负载不正常维修,模块坏维修,控制板维修、过電(diàn)流超速、过压、欠压、过热、过载、接地、速度不稳维修参数错误、模拟量报警、有(yǒu)显示无输出、模块损坏报错等维修。4.PLC/ 控制器维修各种品牌 CPU 模块单元,数字量,模拟量输入输出模块,以太网通讯模块等,常见故障如上電(diàn)不工(gōng)作(zuò)電(diàn)源板损坏,通讯不良,面板报 ERR指示灯,SF 灯闪,I/0 故障,密码保护无法进入程序等。5.工(gōng)业電(diàn)源维修各种品牌开关電(diàn)源、線(xiàn)性直流電(diàn)源、直流变换電(diàn)源、交流稳压電(diàn)源、逆变電(diàn)源、UPS 及其他(tā)電(diàn)源模块。6.软启动器维修常见故障:①.状态故障:直流过/久压、直流过流、交流过流、速度偏差过大、接地故障、缺相等②.硬件故障:電(diàn)流板故障、触发板故障、IGBT故障、脉冲发生器故障等③.系统故障:Watchdog 故障、系统参数异常、时钟故障等④.通讯故障: TIMEOUT、OVERRUN等⑤.電(diàn)源故障:当控制電(diàn)源过高/过低时报警7.触摸屏维修8.伺服電(diàn)机驱动器维修9.变频器维修专业机器人维修机器人本體(tǐ)维修、机器人保养、示教器维修、伺服驱动器维修、伺服電(diàn)机、控制柜、驱动模块维修、電(diàn)源维修等等关于我们苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加我们 了解更多(duō)内容

CP6203-0001-0020倍福触摸屏维修检测——浙江药业公(gōng)司倍福触摸屏常见故障一、屏幕偏移故障现象:偏移分(fēn)為(wèi)垂直偏移与水平偏移。垂直偏移表现為(wèi)屏幕位置不变,但实际工(gōng)件与屏幕显示的位置有(yǒu)差距;水平偏移表现為(wèi)屏幕显示的位置不变,但实际工(gōng)件与屏幕显示的位置有(yǒu)差距。故障原因:垂直偏移的原因有(yǒu)机械故障、安(ān)装(zhuāng)不水平、轴与屏的平行度误差等;水平偏移的原因除了机械故障外,还有(yǒu)可(kě)能(néng)是光路不正或光源偏离、摄像机参数不正确等。解决方法:对于垂直偏移,我们需要检查传动机构是否正常,是否存在松动、脱落等问题;对于安(ān)装(zhuāng)不水平的问题,需要重新(xīn)调整安(ān)装(zhuāng)位置,确保轴与屏的平行度;对于机械故障,需要维修或更换故障部件。对于水平偏移,我们需要检查光路是否正确,摄像机参数是否正确等,如果存在这些问题,需要调整光路和摄像机参数。二、屏幕无显示故障现象:屏幕无任何显示,但電(diàn)源指示灯亮。故障原因:造成这种故障的原因可(kě)能(néng)是電(diàn)源未接通或電(diàn)源線(xiàn)接触不良;另外,控制卡可(kě)能(néng)损坏,如断線(xiàn)、虚焊等;软件方面可(kě)能(néng)是驱动未装(zhuāng)或驱动设置不正确。解决方法:首先检查電(diàn)源是否接通,電(diàn)源線(xiàn)是否接触良好;如果電(diàn)源正常,则检查控制卡是否有(yǒu)故障,如断線(xiàn)、虚焊等;如果控制卡正常,则检查驱动是否已正确安(ān)装(zhuāng)和设置。三、花(huā)屏故障现象:屏幕上出现横竖的条纹或斑点状的花(huā)纹。故障原因:造成这种故障的原因可(kě)能(néng)是触摸屏在使用(yòng)过程中(zhōng)受到外部强烈的震动或冲击,导致触摸屏内部数据線(xiàn)松动或断裂。解决方法:对于这种故障,我们需要检查触摸屏的数据線(xiàn)是否松动或断裂,如果存在问题,需要重新(xīn)连接或更换数据線(xiàn)。同时,我们还需要检查控制卡是否有(yǒu)故障,如虚焊、断線(xiàn)等。如果控制卡正常,则可(kě)能(néng)是软件设置问题,需要重新(xīn)设置参数或更新(xīn)驱动程序。四、触摸无反应故障现象:触摸屏幕时无任何反应,但電(diàn)源指示灯亮。故障原因:造成这种故障的原因可(kě)能(néng)是触摸屏表面有(yǒu)灰尘或污垢阻挡了信号的传输;或者是控制卡与计算机通信存在故障。解决方法:首先检查触摸屏表面是否有(yǒu)灰尘或污垢阻挡了信号的传输;如果有(yǒu),则清洁触摸屏表面。如果表面清洁后仍然无反应,则可(kě)能(néng)是控制卡与计算机通信存在故障;需要检查通信線(xiàn)路是否接触良好,或者重新(xīn)安(ān)装(zhuāng)驱动程序。如果以上方法都无法解决问题,可(kě)能(néng)是触摸屏本身存在故障;需要维修或更换触摸屏。苏州恩勒苏州恩勒--机器人维修平台承接全國(guó)机器人维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒——深耕维修十年关于我们苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加我们 了解更多(duō)内容

史陶比尔机器人维护改造调试——江浙沪现场苏州恩勒专业史陶比尔机器人维护改造——苏州恩勒一、史陶比尔机器人的基本结构史陶比尔机器人是一种具(jù)备高度模块化和可(kě)编程性的机器人,其基本结构由以下几部分(fēn)组成:1. 控制器:机器人大脑,指挥机器人的运动和任務(wù)执行。2.伺服系统:提供动力,使机器人能(néng)够做出各种动作(zuò)。3. 传感器:让机器人感知环境,并作(zuò)出相应调整。4. 执行器:包括机械臂、夹具(jù)等,实现机器人与环境的交互。二、史陶比尔机器人的改造史陶比尔公(gōng)司不仅生产(chǎn)标准化的机器人,还会根据客户需求对机器人进行改造。以下是几种常见的改造方式:1. 增加传感器:通过增加传感器,机器人可(kě)以更好地感知环境,提高动作(zuò)的准确性和效率。例如,增加深度相机和激光雷达可(kě)以让机器人更好地识别物(wù)體(tǐ)和地形,适应更复杂的环境。2. 改进控制器:通过改进控制器,可(kě)以让机器人更好地學(xué)习和适应任務(wù)。例如,增加GPU和深度學(xué)习算法,可(kě)以使机器人在处理(lǐ)复杂任務(wù)时更加智能(néng)。3. 增强伺服系统:通过增强伺服系统,可(kě)以让机器人具(jù)备更高例的如速,度更和换力更量高。功率的電(diàn)机和传动机构,可(kě)以使机器人在执行任務(wù)时更加迅速和有(yǒu)力。4. 定制化执行器:根据客户需求定制执行器,可(kě)以使机器人在执行任務(wù)时更加适应环境。例如,在医(yī)疗领域,通过定制夹具(jù)和机械臂,可(kě)以让机器人更好地协助医(yī)生进行手术。 三、史陶比尔机操人的创新(xīn)应用(yòng)除了改造机器人外,史陶比尔公(gōng)司还在积极探索机器人的创新(xīn)应用(yòng)。以下是几种史陶比尔机器人的创新(xīn)应用(yòng)场景:1. 工(gōng)业制造:史陶比尔机器人在工(gōng)业制造领域有(yǒu)着广泛的应用(yòng),如生产(chǎn)線(xiàn)上的装(zhuāng)配、焊接、搬运等工(gōng)作(zuò)。通过改造机器人,可(kě)以使其具(jù)备更高的速度、精(jīng)度和耐用(yòng)性,提高生产(chǎn)效率;2. 医(yī)疗护理(lǐ):史陶比尔机器人在医(yī)疗护理(lǐ)领域有(yǒu)着广泛的应用(yòng),如手术助手、康复训练、药品管理(lǐ)等。通过定制化执行器和增加传感器,可(kě)以让机器人更好地适应医(yī)疗环境,提高医(yī)疗服務(wù)的质(zhì)量。3.军事领域:史陶比尔机器人在军事领域也有(yǒu)着广泛的应用(yòng),如排爆、搜救、侦察等。通过改造机器人,可(kě)以使其具(jù)备更高的耐用(yòng)性、灵活性和感知能(néng)力,提高军事行动的效率和安(ān)全性。4. 教育培训:史陶比尔机器人在教育培训领域也有(yǒu)着广泛的应用(yòng),如模拟操作(zuò)、技(jì )能(néng)培训等。通过改进控制器和增加传感器,可(kě)以让机器人更好地适应教育培训环境。苏州恩勒——专业工(gōng)控设备维修 维修不限型号故障 有(yǒu)专业测试平台苏州恩勒——专业机器人维修保养改造调试如果您有(yǒu)任何维修保养方面上的需求,请及时联系我们,苏州恩勒专做工(gōng)控设备维修,专业机器人维护 伺服维修 触摸屏维修 变频器维修 数控系统维修 工(gōng)控机维修 直流调速器维修 PLC维修 工(gōng)业電(diàn)源维修 软启动器维修关于我们苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加 查询更多(duō)精(jīng)彩内容

承接机器人维修保养改造一站式服務(wù)苏州恩勒专业机器人维护改造——苏州恩勒主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智、松下、電(diàn)装(zhuāng)、UR优傲等从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等。苏州恩勒——专业机器人维修 维修不限型号故障 有(yǒu)专业测试平台苏州恩勒——专业工(gōng)控设备维修1.数控系统维修各类数控系统板卡如存贮卡、定位模块、显示屏、電(diàn)源模块、CPU板卡等,以及西门子610.611系列伺服驱动的電(diàn)源模块,发那科(kē)5系列、7系列、0系列、15、18系统以及01系统等,此外还有(yǒu)哈斯数控、辛辛那提、海德(dé)汉、发格、大限、三菱、AB机AMADA。2.工(gōng)控机维修研详(EVOC)系列、研华系列、(ADVANTECH)大众系列(LEO)西门子系列(SIEMENS)华北(NOCOR)工(gōng)控系列、艾蕾(ILACS)、凌华系列(ADLINK)、四维科(kē)瑞(CRESUN)、研 杨AAEON)系列。3.直流调速器维修无输出维修,烧保险维修,开不了机维修,面板无显示维修,启动无输出维修,输出電(diàn)压不正常维修负载不正常维修,模块坏维修,控制板维修、过電(diàn)流超速、过压、欠压、过热、过载、接地、速度不稳维修参数错误、模拟量报警、有(yǒu)显示无输出、模块损坏报错等维修。4.PLC/ 控制器维修各种品牌 CPU 模块单元,数字量,模拟量输入输出模块,以太网通讯模块等,常见故障如上電(diàn)不工(gōng)作(zuò)電(diàn)源板损坏,通讯不良,面板报 ERR指示灯,SF 灯闪,I/0 故障,密码保护无法进入程序等。5.工(gōng)业電(diàn)源维修各种品牌开关電(diàn)源、線(xiàn)性直流電(diàn)源、直流变换電(diàn)源、交流稳压電(diàn)源、逆变電(diàn)源、UPS 及其他(tā)電(diàn)源模块。6.软启动器维修常见故障:①.状态故障:直流过/久压、直流过流、交流过流、速度偏差过大、接地故障、缺相等②.硬件故障:電(diàn)流板故障、触发板故障、IGBT故障、脉冲发生器故障等③.系统故障:Watchdog 故障、系统参数异常、时钟故障等④.通讯故障: TIMEOUT、OVERRUN等⑤.電(diàn)源故障:当控制電(diàn)源过高/过低时报警测试平台齐全苏州恩勒 专业机器人维修 机器人本體(tǐ)维修、机器人保养、示教器维修、伺服驱动器维修、伺服電(diàn)机、控制柜、驱动模块维修、電(diàn)源维修不限型号故障 有(yǒu)专业测试平台如果您有(yǒu)任何维修保养方面上的需求,请及时联系我们,苏州恩勒专做工(gōng)控设备维修,专业机器人维护 伺服维修 触摸屏维修 变频器维修 数控系统维修 工(gōng)控机维修 直流调速器维修 PLC维修 工(gōng)业電(diàn)源维修 软启动器维修关于我们苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加 查询更多(duō)精(jīng)彩内容

现代机器人控制主板BD530V22-2103-001-B维修——吉林公(gōng)司——承接机器人维护改造服務(wù)苏州恩勒机器人控制主板常见故障有(yǒu)哪些?一、启动故障机器人控制主板在启动时可(kě)能(néng)出现无法启动的情况,这可(kě)能(néng)是由于電(diàn)源故障、主板损坏或连接線(xiàn)问题等原因引起的。针对这种情况,可(kě)以检查電(diàn)源是否正常,连接線(xiàn)是否松动或损坏,并确保主板上的所有(yǒu)部件都连如接果正以确上。方法无法解决问题,可(kě)以考虑更换控制主板。二、运行故障机器人控制主板在运行过程中(zhōng)可(kě)能(néng)会出现各种故障,如定位精(jīng)度下降、运动轨迹异常等。这些故障可(kě)能(néng)是由于传感器故障、传动系统故障或控制算法问题等原因引起的。针对这些情况,可(kě)以检查传感器是否正常工(gōng)作(zuò),传动系统是否有(yǒu)异常声音或振动,并检查控制算法是否正确。如果以上方法无法解决问题,可(kě)以考虑升级或更换控制主板。三、通讯故障机器人控制主板在通讯过程中(zhōng)可(kě)能(néng)会出现连接不稳定、通讯中(zhōng)断或信号干扰等问题。这可(kě)能(néng)是由于连接線(xiàn)故障、通讯协议问题或外部干扰等原因引起针的对。这种情况,可(kě)以检查连接線(xiàn)是否正常工(gōng)作(zuò),通讯协议是否设置正确,并采取相应的抗干扰如措果施以。上方法无法解决问题,可(kě)以考虑更换控制主板或升级通讯协议。四、其他(tā)故障机器人控制主板还可(kě)能(néng)出现其他(tā)一些故障,如電(diàn)源短路、过热保护等。这些故障可(kě)能(néng)是由于電(diàn)路设计不合理(lǐ)、散热系统故障或部件损坏等原因引针起对的这。些情况,可(kě)以检查電(diàn)源電(diàn)路设计是否合理(lǐ),散热系统是否正常工(gōng)作(zuò),并检查所有(yǒu)部件是否有(yǒu)损如坏果。以上方法无法解决问题,可(kě)以考虑更换控制主板或升级電(diàn)路设计。如果您有(yǒu)任何维修保养方面上的需求,请及时联系我们,苏州恩勒专做工(gōng)控设备维修,专业机器人维护 伺服维修 触摸屏维修 变频器维修 数控系统维修 工(gōng)控机维修 直流调速器维修 PLC维修 工(gōng)业電(diàn)源维修 软启动器维修关于我们苏州恩勒苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加 查询更多(duō)精(jīng)彩内容

ABB机器人驱动器维修DSQC639——河北医(yī)药公(gōng)司——承接ABB机器人维护改造一、故障:ABB机器人在有(yǒu)脉冲输出时不工(gōng)作(zuò)解决方案:①监督操控器的脉冲输出当时值以及脉冲输出灯是否闪烁,承认指令脉冲现已履行并现已正常输出脉冲;②查看操控器到驱动器的操控電(diàn)缆,动力電(diàn)缆,编码器電(diàn)缆是否配線(xiàn)过错,破损或许接触不良;③查看带制动器的伺服電(diàn)机其制动器是否现已翻开;④监督伺服驱动器的面板承认脉冲指令是否输入;⑤Run运转指令正常;⑥操控形式必须挑选方位操控形式;⑦伺服驱动器设置的输入脉冲类型和指令脉冲的设置是否共同;⑧确保正转侧驱动制止,回转侧驱动制止信号以及差错计数器复位信号没有(yǒu)被输入,脱开负载而且空载运转正常,查看机械體(tǐ)系。二、故障:没有(yǒu)带负载报过载解决方案:①查看伺服電(diàn)机动力電(diàn)缆配線(xiàn),查看是否有(yǒu)接触不良或電(diàn)缆破损;假如是带制动器的伺服電(diàn)机则必须将制动器翻开;速度回路增益是否设置过大;速度回路的积分(fēn)时间常数是否设置过小(xiǎo)。②方位回路增益是否设置过大;定位完成幅值是否设置过小(xiǎo);查看伺服電(diàn)机轴上没有(yǒu)堵转,并从头调整机械。三、故障:运转时出现反常声音或颤动现象解决方案:①伺服配線(xiàn):运用(yòng)规范动力電(diàn)缆,编码器電(diàn)缆,操控電(diàn)缆,電(diàn)缆有(yǒu)无破损;查看操控線(xiàn)附近是否存在干扰源,是否与附近的大電(diàn)流动力電(diàn)缆互相平行或相隔太近;查看接地端子電(diàn)位是否有(yǒu)发作(zuò)变化,实在确保接地杰出。②伺服参数:伺服增益设置太大,主张用(yòng)手动或主动方法从头调整伺服参数;承认速度反应滤波器时间常数的设置,初始值為(wèi)0,可(kě)测验增大设置值;電(diàn)子齿轮比设置太大,主张恢复到出厂设置;伺服體(tǐ)系和机械體(tǐ)系的共振,测验调整陷波滤波器频率以及幅值。③机械體(tǐ)系:衔接電(diàn)机轴和设备體(tǐ)系的联轴器发作(zuò)偏移,安(ān)装(zhuāng)螺钉未拧紧;滑轮或齿轮的咬合不良也会导致负载转矩变化,测验空载运转,假如空载运转时正常则查看机械體(tǐ)系的结合部分(fēn)是否有(yǒu)反常;承认负载惯量,力矩以及转速是否过大,测验空载运转,假如空载运转正常,则减轻负载或替换更大容量的驱动器和電(diàn)机。四、故障:ABB机器人伺服電(diàn)机修理(lǐ)做方位操控运转报超速故障解决方案:查看伺服電(diàn)机动力電(diàn)缆和编码器電(diàn)缆的配線(xiàn)是否正确,有(yǒu)无破损五、故障:高速旋转时出现電(diàn)机差错计数器溢出过错解决方案:①高速旋转时发作(zuò)電(diàn)机差错计数器溢出过错:查看電(diàn)机动力電(diàn)缆和编码器電(diàn)缆的配線(xiàn)是否正确,電(diàn)缆是否有(yǒu)破损。②输入较長(cháng)指令脉冲时发作(zuò)電(diàn)机差错计数器溢出过错,运转过程中(zhōng)发作(zuò)電(diàn)机差错计数器溢出过错:增大差错计数器溢出水平设定值;减慢旋转速度;延長(cháng)加减速时间;负载过重,需求从头选定更大容量的電(diàn)机或减轻负载,加装(zhuāng)减速机等传动组织提高负载才能(néng)。六、故障:机器人50204动作(zuò)监控报警解决方案:①修改机器人动作(zuò)监控参数(控制面板—动作(zuò)监控菜单中(zhōng))以匹配实际的情况。②用(yòng)AccSet指令降低机器人加速度。③减小(xiǎo)速度数据中(zhōng)的v_rot选项。七、故障:机器人在开机时进入了系统故障状态解决方案:①重新(xīn)启动一次机器人。②如果不行,在示教器查看是否有(yǒu)更详细的报警提示,并进行处理(lǐ)。③重启。④如果还不能(néng)解除则尝试B启动。⑤如果还不行,请尝试P启动。⑥如果还不行请尝试I启动(这将机器人回到出厂设置状态,小(xiǎo)心)苏州恩勒苏州恩勒--机器人维修平台承接全國(guó)机器人维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒——深耕维修十年关于我们苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加我们 了解更多(duō)内容

施耐德(dé)驱动器维修LMC600CAA10120——山(shān)东制药公(gōng)司ALE01过電(diàn)流 主回路電(diàn)流值電(diàn)机瞬间電(diàn)流值1.5 倍时动作(zuò)ALE02过電(diàn)压 主回路電(diàn)压值高于规格值时动作(zuò)ALE03低電(diàn)压 主回路電(diàn)压值低于规格電(diàn)压时动作(zuò)ALE04保留保留ALE05( 再生异常再生控制动作(zuò)异常时动作(zuò)ALE06过负载電(diàn)机及驱动器过负载时动作(zuò)ALE07过速度電(diàn)机控制速度正常速度过大时动作(zuò)ALE08异常脉冲控制命令脉冲命令的输入频率硬件界面容许值时动作(zuò)ALE09位置控制误差过大位置控制误差量大于设定容许值时动作(zuò)ALE10芯片执行超时芯片异常时动作(zuò)ALE11编码器异常编码器产(chǎn)生脉冲信号异常时动作(zuò)ALE12校正异常执行電(diàn)气校正时校正值容许值时动作(zuò)ALE13紧急停止紧急按钮按下时动作(zuò)ALE14反向极限异常反向极限开关被按下时动作(zuò)ALE15( 正向极限异常正向极限开关被按下时动作(zuò)ALE16 IGBT 温度异常IGBT 温度过高时动作(zuò)ALE17存储器异常存储器(EE-PROM) 存取异常时动作(zuò)ALE18芯片通讯异常芯片通讯异常时动作(zuò)ALE19串行通讯异常RS-232/485 通讯异常时动作(zuò)ALE20串行通讯超时RS-232/485 通讯超时时动作(zuò)ALE21命令写入异常控制命令下达异常时动作(zuò)ALE22主回路電(diàn)源缺相主回路電(diàn)源缺仅单相输入ALE23预先过负载警告苏州恩勒苏州恩勒--机器人维修平台承接全國(guó)工(gōng)控维修:湖(hú)南,西藏,北京,晋州,宗文(wén)區(qū),昌平,通州區(qū),广东,广州,深圳,珠海,江门,天津,福建,福州,厦门,泉州,晋江,三明,龙岩,南平,福清,连江,漳州,山(shān)东,河北,石家庄,保定,唐山(shān),河南,聊城,淄博,滨州,潍坊,东营,莱芜,济南,青岛,重庆,陕西,西安(ān),宝鸡,安(ān)康,铜川,汉中(zhōng),渭南,咸阳,汉中(zhōng),兴平,江西,南昌,吉安(ān),三原,上海,浦东,黄埔,静安(ān),長(cháng)宁,虹口,徐汇,普陀,松江,宝山(shān),青浦,金山(shān),奉贤,南汇,江苏,南京,江阴,苏州,昆山(shān),太仓,吴江,通州,无锡,如东,启东,海安(ān),扬州,江都,宝应,秦州,徐州,丰县,盐城,东台,张家港,连云港,浙江,杭州,绍兴,温州,湖(hú)州,嘉兴,金华,义務(wù),永康,武义,安(ān)吉,台州,常州,安(ān)徽,合肥,安(ān)庆,马鞍山(shān),来安(ān),毫州,太和,黄山(shān),宿州,桐城,四川,成都,重庆,都江堰,攀枝花(huā),成都,广西,南宁,梧州,贺州,海南,昆阳,保山(shān),丽江,贵州,贵阳,遵义,湖(hú)北,武汉,宜昌,荆州,随州,辽宁,沈阳,锦州,丹东,大连,辽阳,黑龙江,哈尔滨,吉林,長(cháng)春,白城,内蒙古,齐齐哈尔,呼和浩特,宁夏,银川,青海,西宁苏州恩勒——深耕维修十年关于我们苏州恩勒自动化科(kē)技(jì )有(yǒu)限公(gōng)司是一家工(gōng)业机器人专业服務(wù)公(gōng)司,从事國(guó)内外常用(yòng)机器人本體(tǐ)和柜體(tǐ)的销售、回收、维护、调试保养、改造等,主要品牌有(yǒu)库卡KUKA、ABB、安(ān)川Yaskawa、FANUC发那科(kē)、STAUBCI史陶比尔、OTC、COMAU柯马、那智等。同时还拥有(yǒu)一批经验丰富的资深工(gōng)程师,除了快速修复工(gōng)业机器人各种故障外,还能(néng)够高效地解决各大品牌主板、PLC、变频器、触摸屏、伺服驱动器、工(gōng)控机以及PCB電(diàn)路板,UPS電(diàn)路板,工(gōng)业電(diàn)源,仪器仪表数控控制单元、模块等工(gōng)控产(chǎn)品故障。随着社会的进步我们也不断更新(xīn)设备与技(jì )术,力争成為(wèi)机器人服務(wù)行业的领跑者。联系我们微信号:18013148504扫码添加我们 了解更多(duō)内容